Xilinx DRM KMS DisplayPort 1.4 TX Subsystem Driver
- gugulot (Unlicensed)
- Eachuri, Lakshmi Prasanna
- jbaniset (Unlicensed)
The purpose of this page is to describe the Linux DRM driver for the Xilinx DisplayPort 1.4 Tx Subsystem Soft IP for the Zynq UltraScale+ MPSoC and for Versal.
Note: The content of this page is applicable for the 2022.1 release. A few steps for building the kernel or taking sources from Git might be different for previous releases before 2022.1.
Table of Contents
Introduction
The DisplayPort 1.4 Tx Subsystem implements functionality of a video source as defined by the Video Electronics Standards Association (VESA)'s DisplayPort standard v1.4 and supports driving resolutions of up to Full Ultra HD (FUHD) at 30 fps. The subsystem is a hierarchical IP that bundles a collection of DP TX-related IP sub-cores and outputs them as a single IP. The subsystem takes incoming video stream and transfers it to an DP stream. The stream is then forwarded to the video PHY layer. Below is the block diagram of the DisplayPort 1.4 Tx Subsystem.

Figure 1. Block diagram of DisplayPort 1.4 Tx Subsystem
DP Tx interface with Video PHY Controller for Zynq UltraScale+ MPSoC:
The DP 1.4 Tx Subsystem is a MAC subsystem which works with a Video PHY Controller (PHY) to create a video connectivity system. The DP 1.4 Tx Subsystem is tightly coupled with the Xilinx Video PHY Controller, which itself is independent and offers flexible architecture with multiple-protocol support. Both MAC and PHY are dynamically programmable through the AXI4-Lite interface.
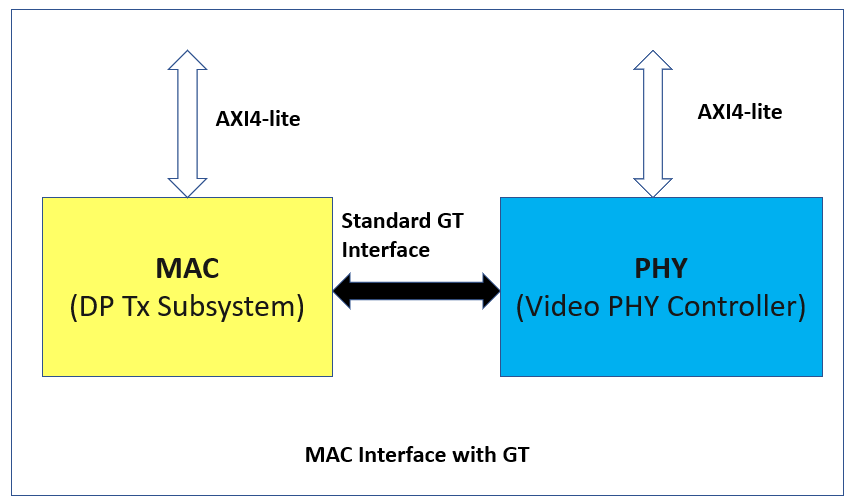
Figure 2. Block diagram of MAC Interface with PHY for MPSoC
DP Tx interface with GT Quad base Controller for Versal:
The DP 1.4 Tx Subsystem is a MAC subsystem which works with a GT Quad Base Controller (PHY) to create a video connectivity system. The DP 1.4 Tx Subsystem is tightly coupled with the Xilinx Video PHY Controller, which itself is independent and offers flexible architecture with multiple-protocol support. Both MAC and PHY are dynamically programmable through the AXI4-Lite interface.
 Figure 3. Block diagram of MAC Interface with PHY for Versal
Figure 3. Block diagram of MAC Interface with PHY for Versal
Driver Overview
DP Tx is the last node in the display pipeline. The Linux driver is implemented as a sub-component of the Xilinx DRM KMS bridge driver (bridge driver name : xlnx) and implements the encoder/connector interface. The subsystem includes the video timing generator and Tx sub-core. The driver implements the DRM callbacks to read the display EDID and present it to the framework any time a display is connected. It works in tandem with the DRM bridge driver to validates each mode listed in the EDID and reject unsupported modes.
On a mode change request from the user application, the driver works in conjunction with the DRM framework to validate the requested mode to ensure that the stream can be generated by the Tx core and is supported by the attached display. If the requested mode is supported, the driver will configure the Tx sub-core for the new mode and the internal video timing controller (VTC) to generate the requisite video timing for it. It also configures the PHY layer for the new mode and manages all required interaction between the MAC and PHY layer.
After mode setup is complete, the PHY state machine is reset and put into a wait state awaiting the reference clock for the new mode from an external clock source. The DRM framework requests the registered clock producer to generate the clock for the desired mode.
Driver Features
| IP Feature | 2021.1 | 2021.2 | 2022.1 | 2022.2 | 2023.1 | 2023.2 | 2024.1 | 2024.2 | 2025.1 |
| IP Version Supported | 3.0 | 3.0 | 3.0 | 3.1 | 3.1 | 3.1 | 3.1 | 3.1 | 3.1 |
| Supports AXI4-Stream, native video input interfaces. | AXI-Stream Video Only | AXI-Stream Video Only | AXI-Stream Video Only | AXI-Stream Video Only | AXI-Stream Video Only | AXI-Stream Video Only | AXI-Stream Video Only | AXI-Stream Video Only | AXI-Stream Video Only |
| Support for 2 pixel per sample | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes |
Support color space for RGB, YUV 4:4:4, YUV 4:2:2,Y-only | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes |
| Audio support for 2 channels with 44/48 KHz sample rates | No | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes |
| 8, 10, 12, and 16-bit Deep-color support | Supports8 and 10-bit only | Supports8 and 10-bit only | Supports8 and 10-bit only | Supports8 and 10-bit only | Supports8 and 10-bit only | Supports8 and 10-bit only | Supports8 and 10-bit only | Supports8 and 10-bit only | Supports8 and 10-bit only |
| Support 32 or 16-bit video PHY (GT) interface | Driver tested with 16-bit video PHY | Driver tested with 16-bit video PHY | Driver tested with 16-bit video PHY | Driver tested with 16-bit video PHY | Driver tested with 16-bit video PHY | Driver tested with 16-bit video PHY | Driver tested with 16-bit video PHY | Driver tested with 16-bit video PHY | Driver tested with 16-bit video PHY |
| Support HDCP 1.x | No | No | No | No | No | Yes | Yes | Yes | Yes |
| Support HDCP 2.x | No | No | No | No | Yes | Yes | Yes | Yes | Yes |
| MST mode | No | No | No | No | No | No | No | No | No |
| Supported resolution up to 8k30 | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes |
| Supported interlaced mode | No | No | No | No | No | No | No | No | No |
| Versal Support | No | No | Yes | Yes | Yes | Yes | Yes | Yes | Yes |
| Supports SDP packet for static HDR mode | No | No | No | Yes | Yes | Yes | Yes | Yes | Yes |
Missing Features / Known Issues / Limitations in Driver
- This driver does not support the following features.
- MST
- GTYE4
Kernel Configuration Options for Driver
2019.2 and onwards: Supports ONLY the new Xilinx DRM framework driver and PL crtc and can be enabled via the following configurations options: CONFIG_DRM_XLNX and CONFIG_DRM_XLNX_PL_DISP
The above defined options will only enable the new DRM framework.
- Enable Xilinx DP Tx Subsystem driver
2021.1 and onwards: The DisplayPort Tx driver is built as a part of the kernel, so enable the DisplayPort Tx driver in the kernel configuration. Run the below command from the PetaLinux project and select "Xilinx DRM DisplayPort Subsystem Driver".
$petalinux-config -c kernel
- Enable Video PHY controller driver and FMC drivers.
- 2021.1 and onwards: The Video phy controller driver is built as an out-of-tree kernel module and therefore requires no kernel configuration. However, to enable the driver, the user must include it in the rootfs. The following steps are required to enable the driver.
- 2021.2 and onwards The FMC driver is built as out-of-tree kernel module and therefore requires no kernel configuration. However to enable the driver, the user must include it in the rootfs. The following steps are required to enable the driver.
- Make sure the meta-user layer has the recipe-dp included.
Add the recipe to the PetaLinux image. Editproject-spec/meta-user/conf/user-rootfsconfig and add the new recipe at the end
CONFIG_kernel-module-dp
Next include the driver in the rootfs:
$petalinux-config -c rootfs
- Select "user-pakages->modules->kernel-module-dp", save and exit.
- Enable the GT QUAD base driver
2022.1: the video phy driver for Versal systems is built as part of the kernel so enable this driver in the kernel configuration. Run the below command from the PetaLinux project and select "PHY_XILINX_DPGTQUAD".
$petalinux-config -c kernel
- Enable Audio drivers
2022.1: The DP Rx driver supports audio and works with the ALSA framework. Run the below command from the PetaLinux project and select "CONFIG_SND_SOC".
$petalinux-config -c kernel
Build the project
$petalinux-build
Device Tree Binding
The dts node should be defined with correct hardware configuration. An example device tree node is documented in
2020.1: Documentation/devicetree/bindings/xlnx,v-dp-tx-ss.txt - Deprecated
2020.2: Documentation/devicetree/bindings/xlnx,dp-tx.yaml - Deprecated
2021.1 :Documentation/devicetree/bindings/display/xlnx/xlnx,dp-tx.yaml - Deprecated
2021.2: Documentation/devicetree/bindings/display/xlnx/xlnx,dp-tx.yaml - Deprecated
2022.1 : Documentation/devicetree/bindings/media/xilinx/xlnx,v-dprxss.yaml
2023.1 : Documentation/devicetree/bindings/display/xlnx/xlnx,dp-tx.yaml
2023.2 : Documentation/devicetree/bindings/display/xlnx/xlnx,dp-tx.yaml
2024.1 : Documentation/devicetree/bindings/display/xlnx/xlnx,dp-tx.yaml
2024.2: Documentation/devicetree/bindings/display/xlnx/xlnx,dp-tx.yaml
2025.1: Documentation/devicetree/bindings/display/xlnx/xlnx,dp-tx.yaml
Building Device Tree with FMC
The below modifications to be done in the device-tree for FMC driver.
- Merge the changes suggested for DisplayPort TX from below page.
Reference solution for Zynq UltraScale+ MPSoC
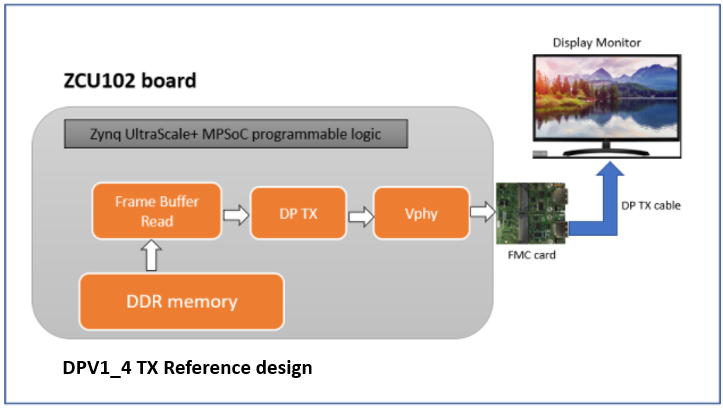
Figure 4. DisplayPort Tx reference solution for Zynq UltraScale+ MPSoC
Reference solution for Versal :
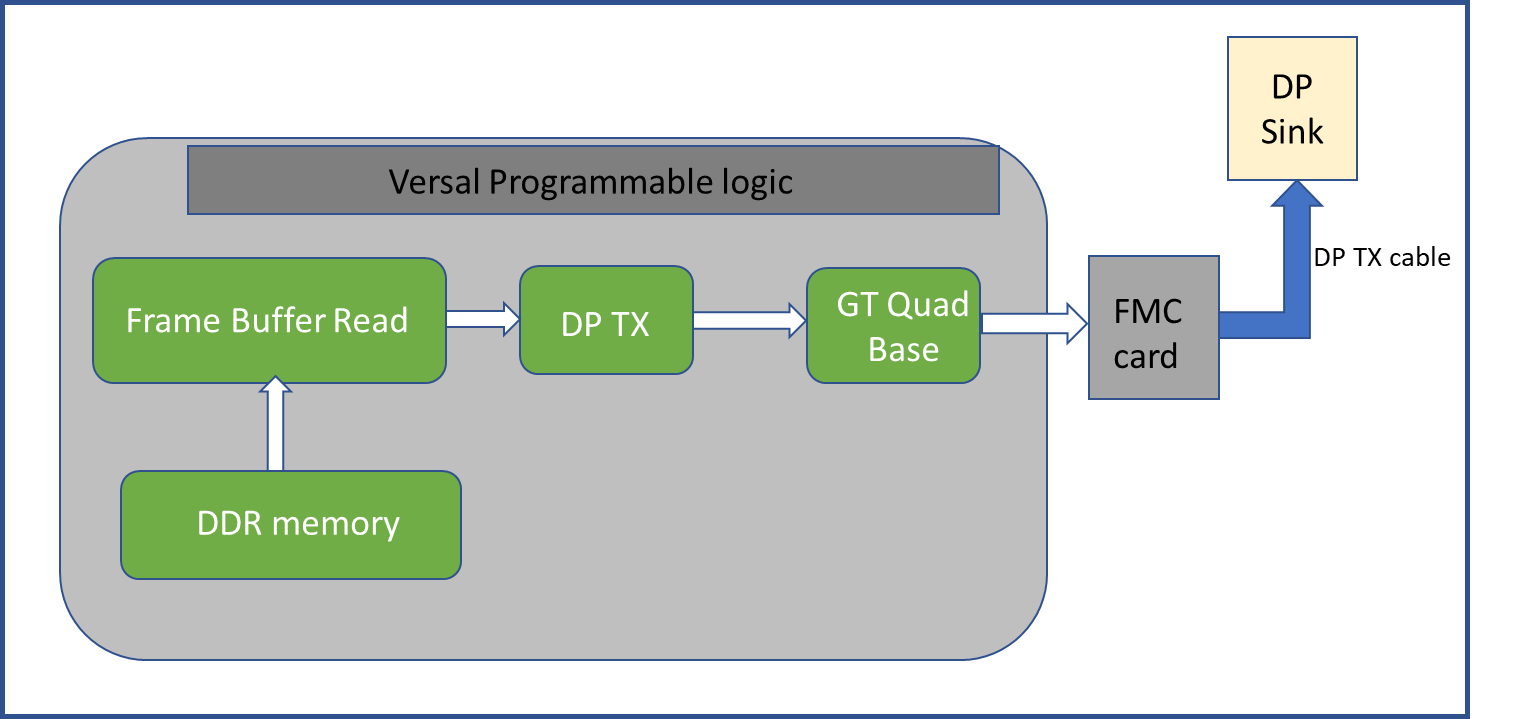
Figure 5. DisplayPort Tx reference solution for Versal
Test Procedure
Test procedure for video display:
DP-Tx can be manually configured to generate the required mode. An open source utility such as modetest can be used to configure the display pipeline.
DDR ==>FB_Rd (DMA)==>DP _Tx
2020.1 and later: The Sample command to set a mode is shown below:
%> modetest -D amba_pl@0:drm-pl-disp-drv -s <connector_id>[@<crtc_id>]:<mode>[-<vrefresh>][@<format>
Example command:
%> modetest -D amba_pl@0:drm-pl-disp-drv -s 35:1920x1080-60@BG24
The above command will generate a color bar pattern at the requested resolution in DDR, configure the DMA to read the frame from DDR and configure the DP Tx for said resolution. As a final result, the Color Bar at the defined resolution should be visible on screen.
The driver also supports changing output color formats dynamically. Available output color formats supported by DMA engine can be determined using the modetest utility as shown below:
root@xilinx-zcu102-2022_1:/media# modetest -D amba_pl@0:drm-pl-disp-drv
Encoders:
id crtc type possible crtcs possible clones
34 0 TMDS 0x00000001 0x00000000
Connectors:
id encoder status name size (mm) modes encoders
35 0 connected DP-1 700x390 39 34
modes:
name refresh (Hz) hdisp hss hse htot vdisp vss vse vtot)
7680x4320 29.93 7680 7710 7720 7880 4320 4323 4328 4368 1030240 flags: phsync, nvsync; type: preferred, driver
7680x4320 24.00 7680 7728 7760 7880 4320 4323 4328 4369 826250 flags: phsync, nvsync; type: preferred, driver
3840x2160 60.00 3840 3888 3920 4000 2160 2163 2168 2222 533250 flags: phsync, nvsync; type: preferred, driver
3840x4320 60.00 3840 3888 3920 4040 4320 4323 4333 4368 1058790 flags: phsync, nvsync; type: driver
3840x4320 48.00 3840 3888 3920 4040 4320 4323 4333 4418 856720 flags: phsync, nvsync; type: driver
3840x2160 29.98 3840 3888 3920 4000 2160 2163 2168 2191 262750 flags: phsync, nvsync; type: driver
2560x1440 59.95 2560 2608 2640 2720 1440 1443 1448 1481 241500 flags: phsync, nvsync; type: driver
1920x1200 59.88 1920 2056 2256 2592 1200 1203 1209 1245 193250 flags: nhsync, pvsync; type: driver
2048x1080 59.99 2048 2096 2128 2208 1080 1083 1093 1111 147160 flags: phsync, nvsync; type: driver
2048x1080 23.90 2048 2096 2128 2208 1080 1083 1093 1099 58000 flags: phsync, nvsync; type: driver
1920x1080 60.00 1920 2008 2052 2200 1080 1084 1089 1125 148500 flags: nhsync, nvsync; type: driver
1920x1080 60.00 1920 2008 2052 2200 1080 1084 1089 1125 148500 flags: phsync, pvsync; type: driver
1920x1080 59.94 1920 2008 2052 2200 1080 1084 1089 1125 148352 flags: phsync, pvsync; type: driver
1920x1080 50.00 1920 2448 2492 2640 1080 1084 1089 1125 148500 flags: phsync, pvsync; type: driver
1920x1080 24.00 1920 2558 2602 2750 1080 1084 1089 1125 74250 flags: phsync, pvsync; type: driver
1920x1080 23.98 1920 2558 2602 2750 1080 1084 1089 1125 74176 flags: phsync, pvsync; type: driver
1600x1200 60.00 1600 1664 1856 2160 1200 1201 1204 1250 162000 flags: phsync, pvsync; type: driver
1680x1050 59.95 1680 1784 1960 2240 1050 1053 1059 1089 146250 flags: nhsync, pvsync; type: driver
1280x1024 75.02 1280 1296 1440 1688 1024 1025 1028 1066 135000 flags: phsync, pvsync; type: driver
1280x1024 60.02 1280 1328 1440 1688 1024 1025 1028 1066 108000 flags: phsync, pvsync; type: driver
1280x800 59.81 1280 1352 1480 1680 800 803 809 831 83500 flags: nhsync, pvsync; type: driver
1280x720 60.00 1280 1390 1430 1650 720 725 730 750 74250 flags: phsync, pvsync; type: driver
1280x720 59.94 1280 1390 1430 1650 720 725 730 750 74176 flags: phsync, pvsync; type: driver
1280x720 50.00 1280 1720 1760 1980 720 725 730 750 74250 flags: phsync, pvsync; type: driver
1024x768 75.03 1024 1040 1136 1312 768 769 772 800 78750 flags: phsync, pvsync; type: driver
1024x768 60.00 1024 1048 1184 1344 768 771 777 806 65000 flags: nhsync, nvsync; type: driver
800x600 75.00 800 816 896 1056 600 601 604 625 49500 flags: phsync, pvsync; type: driver
800x600 60.32 800 840 968 1056 600 601 605 628 40000 flags: phsync, pvsync; type: driver
720x576 50.00 720 732 796 864 576 581 586 625 27000 flags: nhsync, nvsync; type: driver
720x576 50.00 720 732 796 864 576 581 586 625 27000 flags: nhsync, nvsync; type: driver
720x480 60.00 720 736 798 858 480 489 495 525 27027 flags: nhsync, nvsync; type: driver
720x480 60.00 720 736 798 858 480 489 495 525 27027 flags: nhsync, nvsync; type: driver
720x480 59.94 720 736 798 858 480 489 495 525 27000 flags: nhsync, nvsync; type: driver
720x480 59.94 720 736 798 858 480 489 495 525 27000 flags: nhsync, nvsync; type: driver
640x480 75.00 640 656 720 840 480 481 484 500 31500 flags: nhsync, nvsync; type: driver
640x480 60.00 640 656 752 800 480 490 492 525 25200 flags: nhsync, nvsync; type: driver
640x480 59.94 640 656 752 800 480 490 492 525 25175 flags: nhsync, nvsync; type: driver
640x480 59.94 640 656 752 800 480 490 492 525 25175 flags: nhsync, nvsync; type: driver
720x400 70.08 720 738 846 900 400 412 414 449 28320 flags: nhsync, pvsync; type: driver
props:
1 EDID:
flags: immutable blob
blobs:
value:
00ffffffffffff0010ac47414c353730
201b0104b54627783a7645ae5133ba26
0d5054a54b008100b300d100a9408180
d1c0010101014dd000a0f0703e803020
3500ba892100001a000000ff0046464e
584d3738373037354c0a000000fc0044
454c4c205550333231384b0a000000fd
00184b1eb46c010a2020202020200270
02031df150101f200514041312110302
161507060123091f0783010000a36600
a0f0701f8030203500ba892100001a56
5e00a0a0a0295030203500ba89210000
1a7c3900a080381f4030203a00ba8921
00001aa81600a08038134030203a00ba
892100001a0000000000000000000000
00000000000000000000000000000047
701279000012001682100000ff0edf10
000000000044454c47414c3537300301
5070920184ff1dc7001d800900df102f
0002000400c1420184ff1dc7002f801f
00df10300002000400a84e0104ff0ec7
002f801f00df10610002000900979d01
04ff0ec7002f801f00df102f00020009
00000000000000000000000000009890
2 DPMS:
flags: enum
enums: On=0 Standby=1 Suspend=2 Off=3
value: 3
5 link-status:
flags: enum
enums: Good=0 Bad=1
value: 0
6 non-desktop:
flags: immutable range
values: 0 1
value: 0
4 TILE:
flags: immutable blob
blobs:
value:
313a313a323a313a303a303a33383430
3a3433323000
21 CRTC_ID:
flags: object
value: 0
36 sync:
flags: range
values: 0 1
value: 0
37 bpc:
flags: enum
enums: 6BPC=6 8BPC=8 10BPC=10 12BPC=12
value: 8
CRTCs:
id fb pos size
33 0 (0,0) (0x0)
nan 0 0 0 0 0 0 0 0 0 flags: ; type:
props:
23 ACTIVE:
flags: range
values: 0 1
value: 0
24 MODE_ID:
flags: blob
blobs:
value:
20 OUT_FENCE_PTR:
flags: range
values: 0 18446744073709551615
value: 0
25 VRR_ENABLED:
flags: range
values: 0 1
value: 0
Planes:
id crtc fb CRTC x,y x,y gamma size possible crtcs
32 0 0 0,0 0,0 0 0x00000001
formats: XB30 VU24 XV30 YUYV XV20 BG24
props:
9 type:
flags: immutable enum
enums: Overlay=0 Primary=1 Cursor=2
value: 1
18 FB_ID:
flags: object
value: 0
19 IN_FENCE_FD:
flags: signed range
values: -1 2147483647
value: -1
21 CRTC_ID:
flags: object
value: 0
14 CRTC_X:
flags: signed range
values: -2147483648 2147483647
value: 0
15 CRTC_Y:
flags: signed range
values: -2147483648 2147483647
value: 0
16 CRTC_W:
flags: range
values: 0 2147483647
value: 1920
17 CRTC_H:
flags: range
values: 0 2147483647
value: 1080
10 SRC_X:
flags: range
values: 0 4294967295
value: 0
11 SRC_Y:
flags: range
values: 0 4294967295
value: 0
12 SRC_W:
flags: range
values: 0 4294967295
value: 125829120
13 SRC_H:
flags: range
values: 0 4294967295
value: 70778880
Frame buffers:
id size pitch
root@xilinx-zcu102-2022_1:/media#
Refer to the Line "formats" that indicates the FrameBuffer DMA IP configuration supports XB30 VU24 XV30 YUYV XV20 BG24 GREY Y10 color formats. This setting is configured by the DMA driver device tree node property xlnx,vid-formats
Test procedure for Audio:
The audio has been tested with ALSA utils.
Playback (DP Tx): Playing audio data from a file.
aplay -D hw:0,0 -fS24_LE -r 48000 -c 2 -t raw <output filename.raw>
Device enumeration:
aplay --device="hw:0,0" --dump-hw-params
Debug Capability
The DP Linux driver implements the capability to tap IP status at pre-defined points in the control flow. User can enable the debug taps by uncommenting the pre-processor directive (#define DEBUG) to monitor the progress within the driver. All debug prints are sent to serial console and can be viewed in kernel dmesg buffer
Boards Supported
The Driver has been tested on following boards
- ZCU102 Rev 1.0
- VCK190
Change Log
2025.1
- No Changes.
2024.2
- No Changes.
2024.1
- Summary:
- 64afc8f drm: xlnx: Fix HDCP timer interrupt initialization
- fd73c50 drm: xlnx: Fix hdcp dpcd read/writes
- 545fa55 Fix unannotated fall-through between switch labels in xlnx_dp_check_clock_recovery api().
- 5207ca3 drm: xlnx: dptx: Fix xlnx_dp_hdcp_exit() return value
- Summary:
2023.2
- Summary:
- 97a1e9d drm: xlnx: dptx: Add HDCP1x support for DPTx subsystem
- c72b3c3 drm: xlnx: dptx: Update HDCP initialize and callback function names
- Summary:
- 2023.1
- Summary:
- 725f866 drm: xlnx: dptx: Add HDCP2X support
- Summary:
- 2022.2
2022.1
- Summary:
- f7acfeebb2b3 drm: xlnx: dptx: Add HPD pulse handling
- 9b62852ec04b Merge tag 'v5.15' into master
- 28d95a7a50b9 drm: xlnx: dptx: Add VSC SDP packet handling
- 42bb2bae5224 drm: xlnx: dptx: Correct initial wait cycle calculation
- 6dc07b86e1e5 drm: xlnx: dptx: Add changes to meet protocol compliance
- 6c785ec0dd97 drm: xlnx: dptx: set vs and pe on cable disconnect
- 469d8b7be909 drm: xlnx: dptx: Fix dp init as per protocol compliance
- 0b9ebe3218c5 drm: xlnx: dptx: Modify link training sequence as per the specification
- 608fde3204bf drm: xlnx: dptx: Increase reference source waiting period for Aux request
- 3f511821b47d drm: xlnx: dptx: Add changes to get gt_quad_base as phy handle
- 00937fd drm: xlnx: dptx: Add audio codec driver support
- Summary:
2021.2
- Summary:
- 29b1e362ae9b drm: xlnx: dptx: Align kernel-doc name with function
- 65560c916875 drm: xlnx: dptx: Added support for DP audio
- 6e405287ecae drm: xlnx: dptx: Correct link training sequence
- 4e77b0732568 drm: xlnx: dptx: Add support for versal
- b298d79eb836 drm: xlnx: dptx: Fix fallthrough warnings
- 17e77ef080cf drm: xlnx: dptx: Fix extended receiver capability field read
- Summary:
2021.1
Related Links
© Copyright 2019 - 2022 Xilinx Inc. Privacy Policy