- This page gives an overview of the bare-metal driver support for the Xilinx® LogiCORE™ IP AXI Ethernet Lite Media Access Controller (MAC) soft IP.
Table of Contents
Introduction
The AXI Ethernet Lite core is a soft Xilinx IP core for use with the Xilinx Vivado® Design Suite. The Xilinx® LogiCORE™ IP AXI Ethernet Lite Media Access Controller (MAC) core is designed to incorporate the applicable features
described in the IEEE Std. 802.3 Media Independent Interface (MII) specification. It communicates with the processor using the AXI4 or AXI4-Lite interface. The core supports a 10 Mb/s and 100 Mb/s (also known as Fast Ethernet) interface.For more information, please refer to the AXI Ethernet Lite product page which includes links to the official documentation and resource utilization.
Driver Sources
The source code for the driver is included with the Vitis Unified Software Platform installation, as well as being available in the Xilinx Github repository.
Driver Name Path in Vitis Path in Github emaclite <Vitis Install Directory>/data/embedded/XilinxProcessorIPLib/drivers/emaclite_<version> https://github.com/Xilinx/embeddedsw/tree/master/XilinxProcessorIPLib/drivers/emaclite Note: To view the sources for a particular release, use the rel-version tag in github. For example, for the 2020.1 release, the proper version of the code is: https://github.com/Xilinx/embeddedsw/tree/xilinx-v2020.1/XilinxProcessorIPLib/drivers/emaclite
The driver source code is organized into different folders. The table below shows the emaclite driver source organization.
Directory Description doc Provides the API and data structure details
data Driver .tcl and .mdd file examples Example applications that show how to use the driver features src Driver source files Driver Implementation
For a full list of features supported by this IP, please refer to the AXI Ethernet Lite product page.
Features
The AXI Emaclite Standalone driver supports the following features:- Supports Internal loopback mode
- Supports Ping pong buffers for both RX and TX
- Supports MII for connection to external 10/100 Mbps PHY transceivers
- Supports accessing of PHY through MDIO interface.
Known Issues and Limitations
- All IP features are supported.
Example Design Architecture
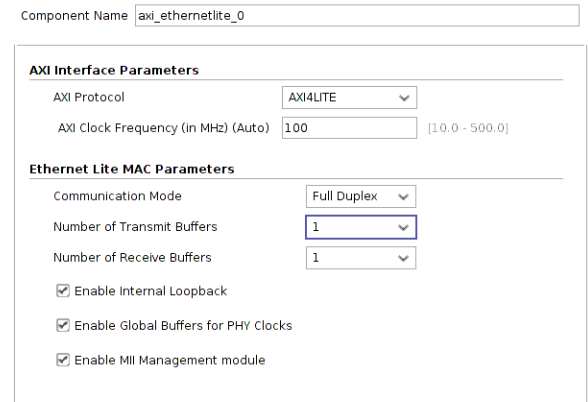
The examples assumes AXI Ethernet IP has number of TX and RX buffer=1 , Internal loopback and MII management module is enabled. For interrupt examples interrupt controller should be connected to processor.
Example Applications
Refer to the driver examples directory for various example applications that exercise the different features of the driver. Each application is linked in the table below. The following sections describe the usage and expected output of the various applications. These example applications can be imported into the Vitis IDE from the Board Support Package settings tab.
Links to Examples
Examples Path: https://github.com/Xilinx/embeddedsw/tree/master/XilinxProcessorIPLib/drivers/emaclite/examples
Test Name Example Source Description Self Test xemaclite_selftest_example.c This example performs the self-test on the emaclite device example does a write to Tx buffer and read back's to verify similarly write to Rx buffer and read back's to verify.
Internal loopback xemaclite_internal_loopback_example.c This is an interrupt example outlines the use of interrupts and callbacks in the transmission/reception of Ethernet frames using internal loopback with an incrementing payload from 1 byte to 1500 bytes (excluding Ethernet Header and FCS). Frame transfer with interrupts xemaclite_intr_example.c This interrupt example outlines the use of interrupts and callbacks in the transmission/reception of an Ethernet frame of 1000 bytes of payload. If the MDIO interface is NOT configured in the EmacLite core then this example will transmit a frame. If the MDIO interface is configured in the EmacLite core then this example will enable the MAC loopback in the PHY device, then transmit the frame and compare the received frame. Frame transfer with polling xemaclite_polled_example.c This polled mode example outlines the transmission/reception of an Ethernet frame of 1000 bytes of payload. If the MDIO interface is NOT configured in the EmacLite core then this example will transmit a frame. If the MDIO interface is configured in the EmacLite core then this example will enable the MAC loopback in the PHY device, then transmit the frame and compare the received frame. PHY loopback xemaclite_phy_loopback_example.c This is an interrupt example outlining the use of interrupts and callbacks in the transmission/reception of Ethernet frames using MAC loop back in
the PHY device with an incrementing payload from 1 byte to 1500 bytes (excluding Ethernet Header and FCS).Ping request xemaclite_ping_req_example.c This is an EmacLite Ping request example in polled mode. This example will generate a ping request for the specified IP address.
Ping reply xemaclite_ping_reply_example.c This is an EmacLite ping reply example in polled mode. This example will generate a ping reply when it receives a ping request packet from the external world. Example Application Usage
Self Test
This example performs the self-test on the emaclite device example and does a write/read on Tx and Rx ping pong buffers.
Expected Output
Successfully ran Emaclite selftest Example
Internal loopback
This is an interrupt example outlining the use of interrupts and callbacks in the transmission/reception of Ethernet frames using internal loopback with an incrementing payload from 1 byte to 1500 bytes.
NOTE- In internal loopback mode, the AXI Ethernet Lite MAC core routes back data on the TX lines to the RX lines.
Expected Output
Successfully ran Emaclite internal loopback Example
Frame transfer with interrupts
This example demonstrates how to transfer packets with interrupts in emaclite phy loopback mode.
Expected Output
Successfully ran Emaclite interrupt Example
Frame transfer with polling
This example demonstrates how to transfer packets with polling in emaclite phy loopback mode.
Expected Output
Successfully ran Emaclite polled Example
PHY loopback
This example demonstrates how to transfer packets with interrupts in emaclite phy loopback mode. If MDIO is not configured a failure is returned.
Expected Output
Successfully ran Emaclite phy loopback Example
Ping request
This example generate a ping request for the specified IP address.
Expected Output
Successfully ran Emaclite ping request Example
Ping reply
This example generate a ping reply when it receives a ping request packet from the external world.
Expected Output
Successfully ran Emaclite ping reply Example
Change Log
2022.1None2021.1
None
2020.2
https://github.com/Xilinx/embeddedsw/blob/xilinx-v2020.2/doc/ChangeLog#L439
2020.1
None
2019.2
None
Related Links
Manage space
Manage content
Integrations