Zynq UltraScale MPSoC Base TRD 2016.4 - Design Module 7
Return to the Design Tutorials Overview.Design Overview
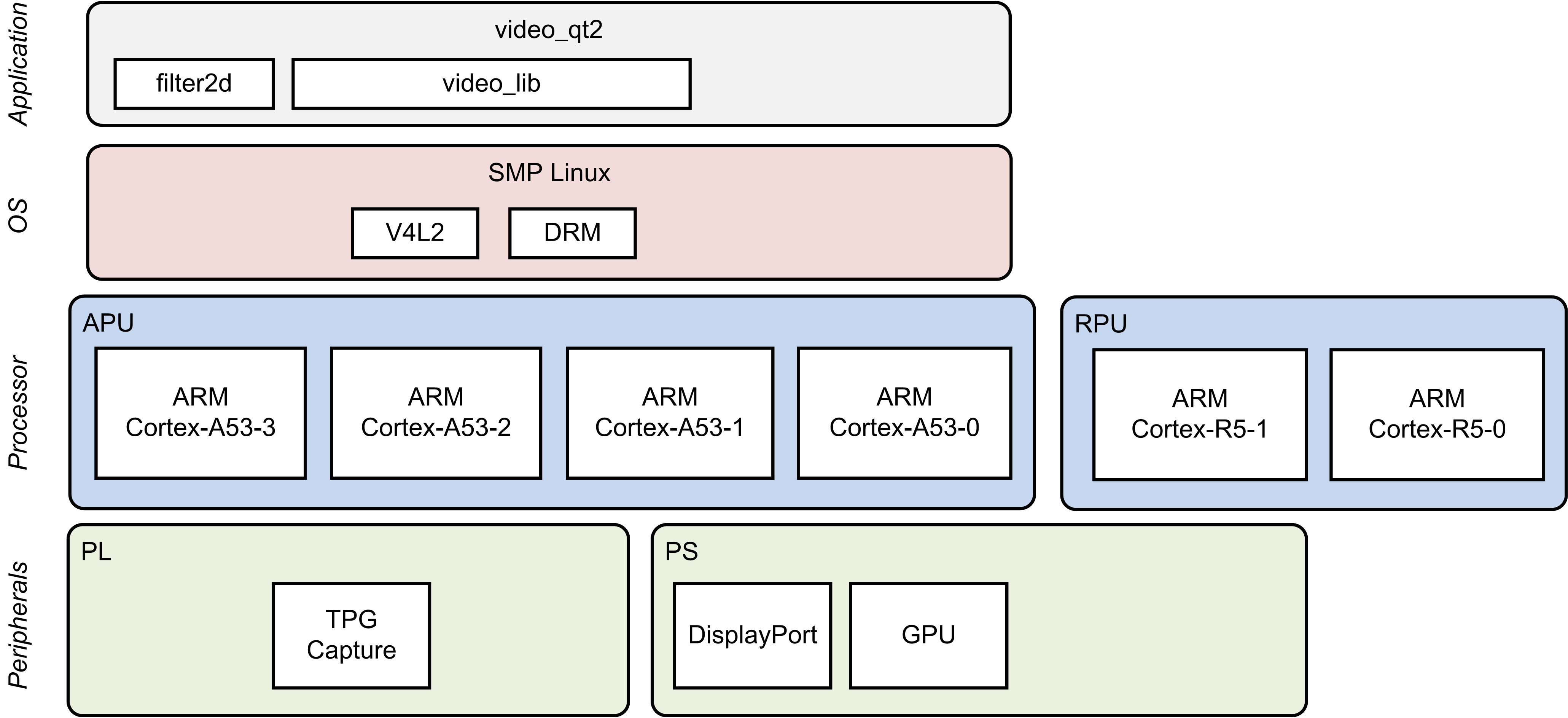
This module shows how to add a 2D convolution filter between the capture pipeline and the display. The 2D filter is implemented purely in software using the OpenCV library.
Design Components
This module requires the following components:
- zcu102_base_trd (SDSoC)
- pmu_fw
- petalinux_bsp
- zynqmp_fsbl
- bl31
- u-boot
- kernel
- device tree
- rootfs
- filter2d (SW)
- video_lib
- video_qt2
Build Flow Tutorials
2D Filter Sample
This tutorial shows how to build the OpenCV version of the 2D filter sample based on the Base TRD SDSoC platform.
- Follow the steps in design module 5 to create a new workspace and to import the video_lib and video_qt2 projects. Otherwise, open the existing XSDK workspace only this time using the SDx tool instead of XSDK.
% cd $TRD_HOME/apu/video_app % sdx -workspace . &&
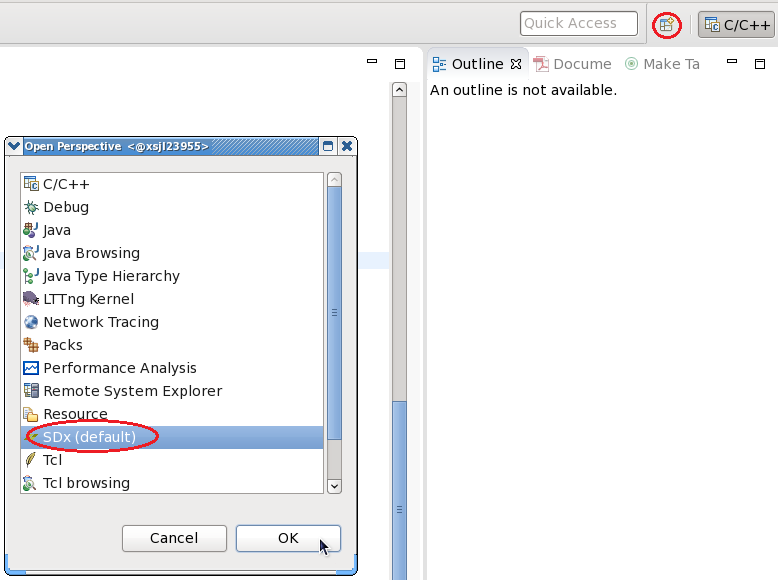
- Change the eclipse perspective to 'SDx' instead of 'C/C++' which is the current selection.
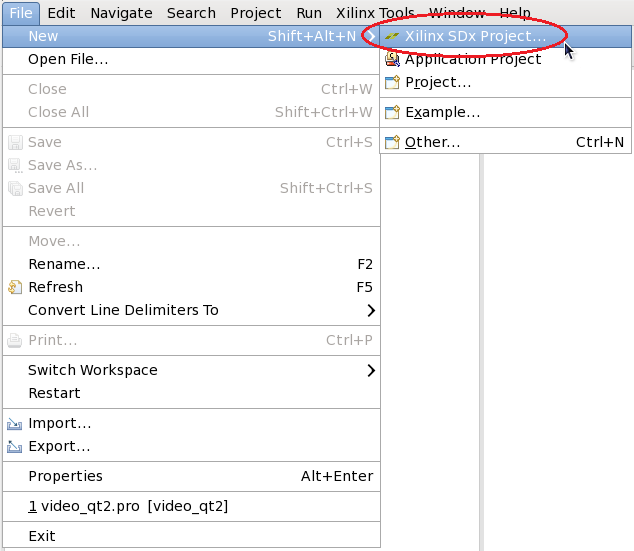
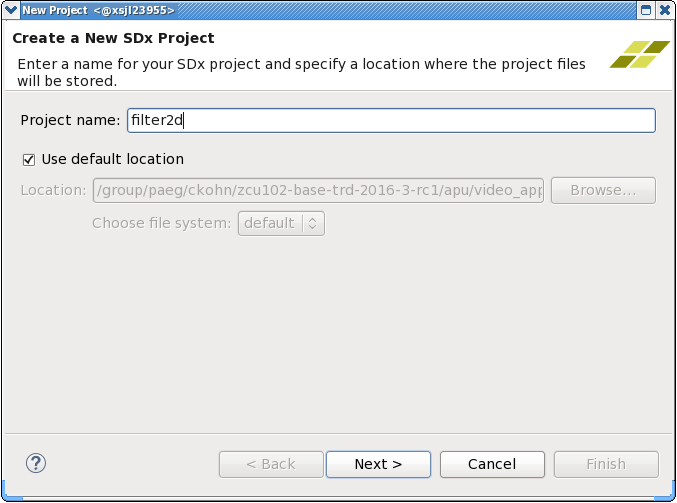
- Create a new SDx Project
- Enter 'filter2d' as project name
- Click 'Add Custom Platform', browse to the $TRD_HOME/apu/zcu102_base_trd directory and confirm. Select the newly added 'zcu102_base_trd (custom)' platform from the list and click 'Next'.

- Check the 'Linux Root File System' box and browse to the $TRD_HOME/apu/petalinux_bsp/build/linux/rootfs/stage directory. This assumes the petalinux-build command has been run in a previous module.
- Check the 'Shared Library' box and click 'Next'.
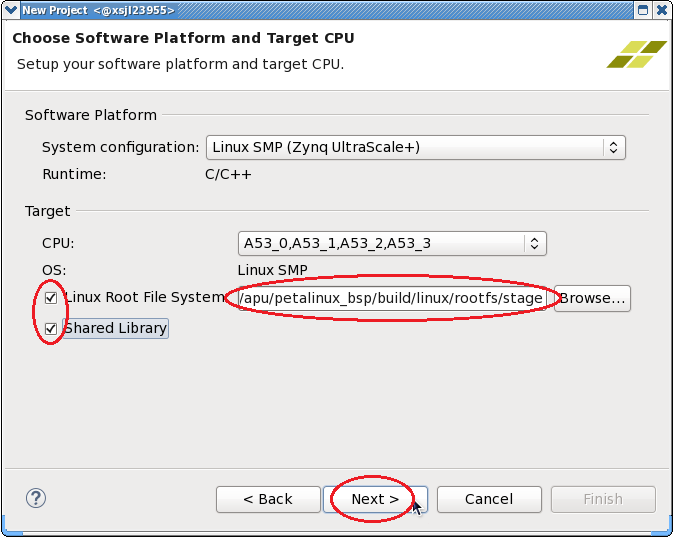
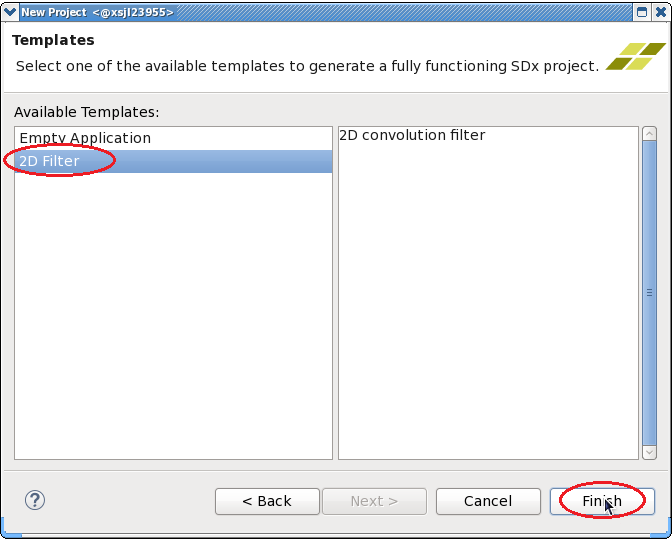
- Select the '2D Filter' template and click 'Finish'.
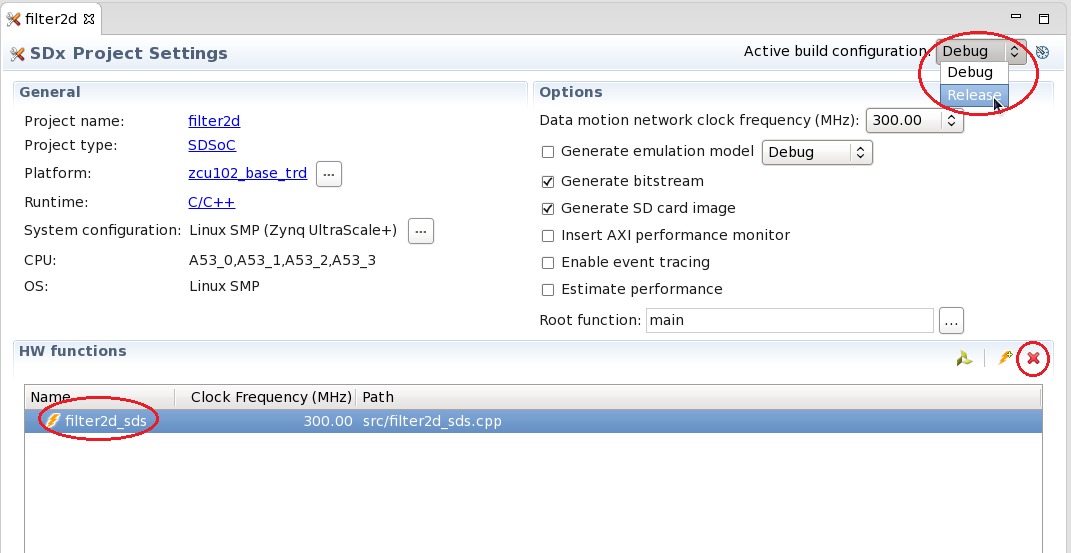
- Change the 'Active build configuration' to Release in the SDx Project Settings window.
- Remove the filter2d_sds HW function by highlighting the function name and clicking the red X symbol.
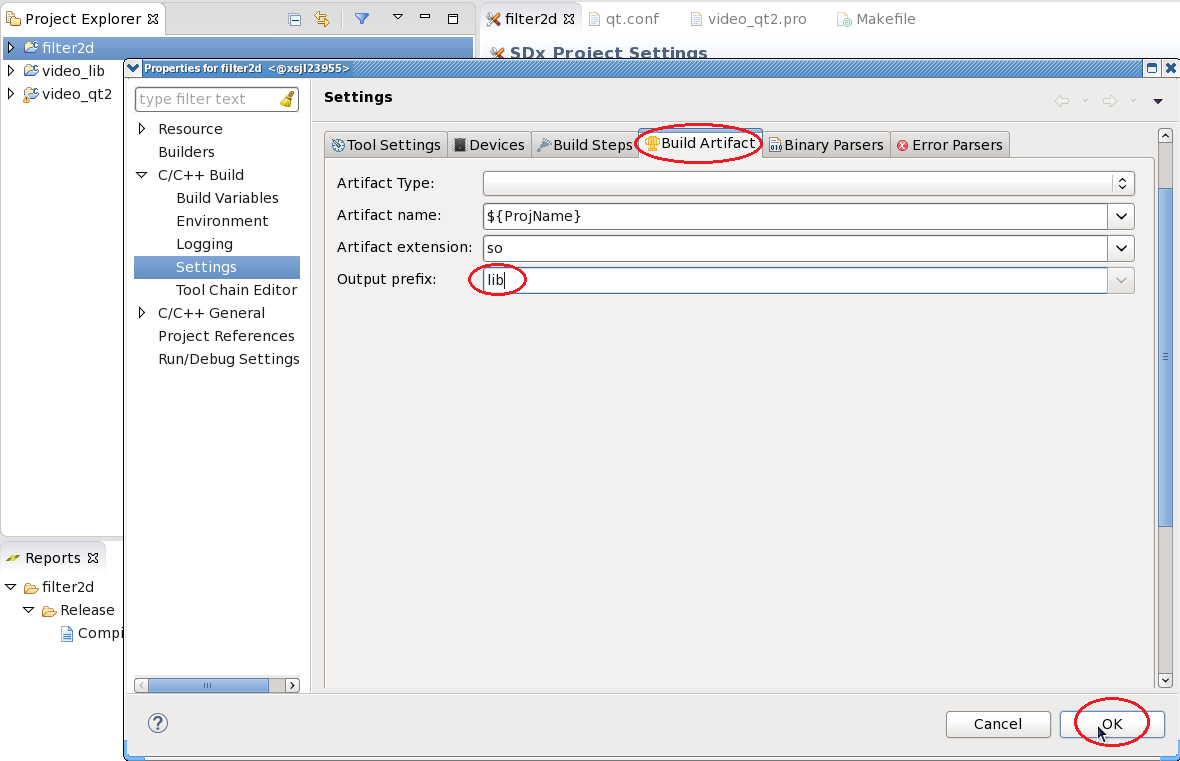
- Right-click the filter2d project, select 'C/C++ Build Settings'. Navigate to the 'Build Artifacts' tab and add the output prefix 'lib'. Click OK.
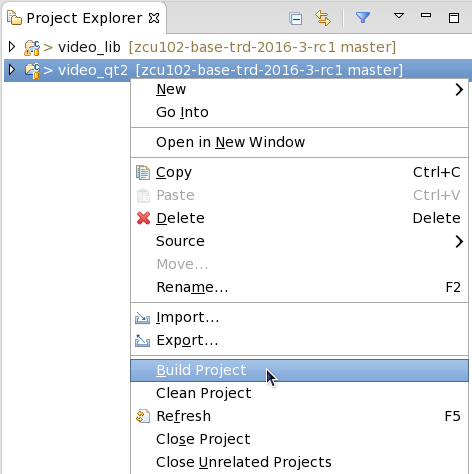
- Right-click the filter2d project and select 'Build Project'.

- Copy the content of the generated sd_card folder to the dm7 SD card directory
% mkdir -p $TRD_HOME/images/dm7/bin % cp -rf filter2d/Release/sd_card/* $TRD_HOME/images/dm7/
Video Qt Application
This tutorial shows how to build the video library and the video Qt application.
- Right-click the video_lib project, select 'C/C++ Build Settings'. Add the symbol 'WITH_SDSOC' and click OK.

- Source the Qt setup script to re-generate the Qt Makefile reflecting these changes.
% cd $TRD_HOME/apu/video_app/video_qt2 % source qmake_set_env.sh % qmake video_qt2-dm7.pro -r -spec linux-oe-g++
- Right-click the video_qt project and click 'Build Project'.
- Copy the generated video_qt2 executable to the dm7 SD card directory.
% cp -f video_qt2 run_video.sh video_qt2_wrap.sh $TRD_HOME/images/dm7/bin/
Run Flow Tutorial
- See here for board setup instructions.
- Copy all the files from the $TRD_HOME/images/dm7 SD card directory to a FAT formatted SD card.
- Power on the board to boot the images; make sure INIT_B, done and all power rail LEDs are lit green.
- After ~30 seconds, the display will turn on and the application will start automatically, targeting the max supported resolution of the monitor (one of 3840x2160 or 1920x1080 or 1280x720).
- Upon application exit, use the below login and password to log into the framebuffer or serial console:
root@Xilinx-ZCU102-2016_3 login: root password: root
- The SD card file system is mounted at /media/card
- To re-start the TRD application type run_video.sh
- The user can now control the application from the GUI's control bar (bottom) displayed on the monitor.
- By default, application launches with VIVID as a video-source, user can also select TPG from the "Video-source selection" button present on the GUI's control-bar.
- Virtual Video Device (VIVID): emulates a USB webcam purely in software
- USB Webcam (UVC): using the universal video class driver
- Test Pattern Generator (TPG); implemented in the PL
- A 2D convolution filter can be turned on and different filter presets can be selected; the following filter modes are available:
- OFF - accelerator is disabled/bypassed
- SW - accelerator is run on A53 using OpenCV algorithm
- HW - accelerator is run on A53 using HLS algorithm
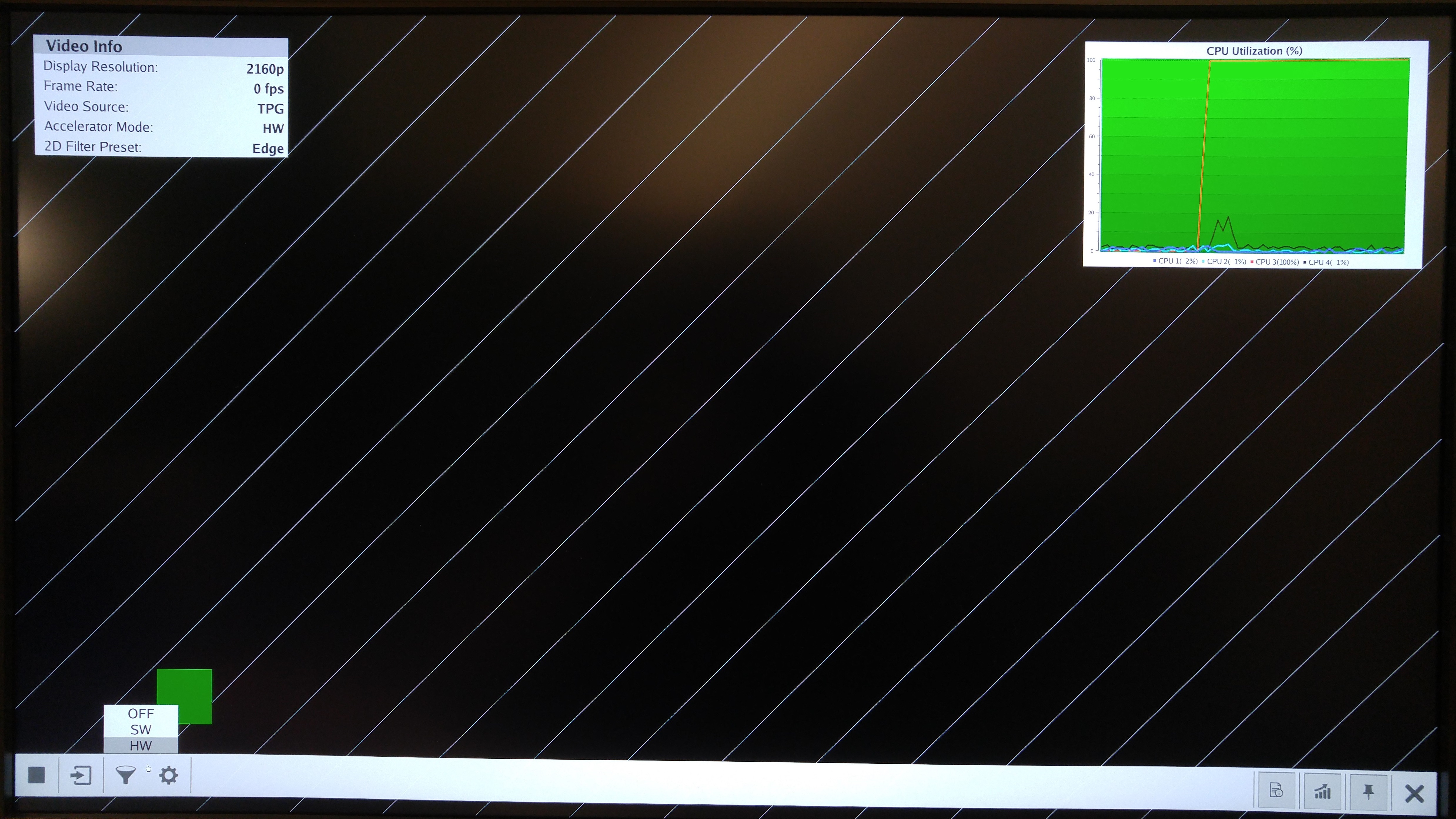
- The video info panel (top left) shows essential settings/statistics.
- The CPU utilization graph (top right) shows CPU load for each of the four A53 cores.