This page provides information related to the Zynq UltraScale+ MPSoC Platform Management Unit (PMU). The PMU controls the power-up, reset, and monitoring of resources within the system.
Table of Contents
| Table of Contents | ||
|---|---|---|
|
Overview of PMU Firmware
The Platform Management Unit (PMU) in Zynq MPSoC has a Microblaze with 32 KB of ROM and 128 KB of RAM. The ROM is pre-loaded with PMU Boot ROM (PBR) which performs pre-boot tasks and enters a service mode. For more details on PMU, PBR and PMUFW load sequence, refer to Platform Management Unit (Chapter-6) in Zynq MPSoC TRM (UG1085). PMU RAM can be loaded with a firmware (PMU Firmware) at run-time and can be used to extend or customize the functionality of PMU. Some part of the RAM is reserved for PBR, leaving around 125.7 KB for PMU Firmware.Here is the memory layout of PMU RAM:

The PMU Firmware provided in Vitis, comes with a default linker script which aligns with this memory layout and there is no specific customization required from user.
Modules
PMU Firmware is designed to be modular and enables adding new functionality in the form of modules. Each functionally distinct feature is designed in as a module, so that PMUFW can be configured to include only the required functionality for a user application. This type of modular design allows easy addition of new features and as well as optimizes memory footprint by disabling unused modules.All the common functions that may be required by the modules are organized as separate libraries in PMUFW with APIs clearly specified. The included APIs in PMU Firmware are given below:
These APIs can be used by the modules in PMUFW to perform the specified actions as required.
Each module can be provided with three handlers which are called in during the respective phases as described below:
| Module Handler | Purpose | API for Registering the Handler | execution context |
| Init | Called during the init of the core to configure the module, register for events or add scheduler tasks. This can be used to load the configuration data into the module if required. | XPfw_CoreSetCfgHandler(const XPfw_Module_t *ModPtr, XPfwModCfgInitHandler_t CfgHandler); | StartUp |
| Event Handler | Called when an event occurs (module should have registered for this event, preferably during the init phase | XPfw_CoreSetEventHandler(const XPfw_Module_t *ModPtr, XPfwModEventHandler_t EventHandler); | Interrupt |
| IPI Handler | Called when an IPI message with respective module-id arrives | XPfw_CoreSetIpiHandler(const XPfw_Module_t *ModPtr, XPfwModIpiHandler_t IpiHandler, u16 IpiId); | Interrupt |
Inter-Processor Interrupts(IPI) Handling in PMUFW
PMU has 4 Inter-Processor Interrupts(IPI) assigned to it and one set of buffers. By default, PMUFW uses IPI-0 and associated buffers for all message exchange with other processors on the SoC. PMUFW uses IPI driver to send and receive messages. An IPI manager layer is implemented over the driver and it takes care of dispatching the IPI message to the registered module handlers based on IPI ID in the first word of the message. The message format for IPI is given below:| Word | Content | Description |
| 0 | Header | <target_module_id, api_id> |
| 1 | PAYLOAD | Module dependent payload |
| 2 | ||
| 3 | ||
| 4 | ||
| 5 | ||
| 6 | RESERVED | RESERVED – for future use |
| 7 | Checksum |
IPI-1 is used for the callbacks from PMU to other masters and for communication initiated by PMUFW.
Currently, PM and EM modules use IPIs and this can be taken as reference for implementing custom modules which require IPI messaging.
Building PMU Firmware using Vitis
| Info |
|---|
For tips configuring PMU firmware builds in PetaLinux see PetaLinux Yocto Tips. |
- Open Vitis
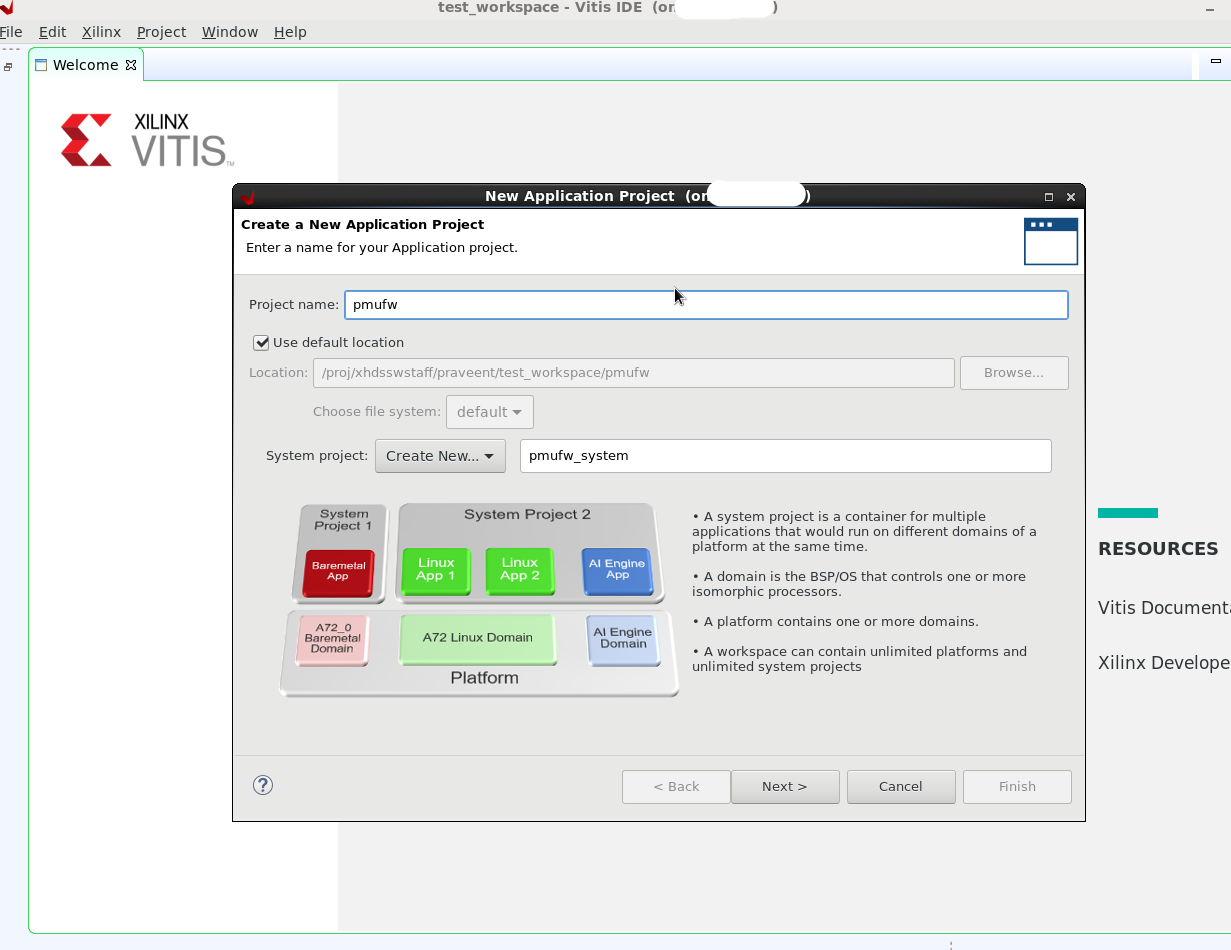
- Create a new application with File->New→Application Project...:
- Enter project name and click on Next. Eg: pmufw
- Select platform as "zcu102" from "Create a new platform from hardware (XSA)" tab options. Click on Next

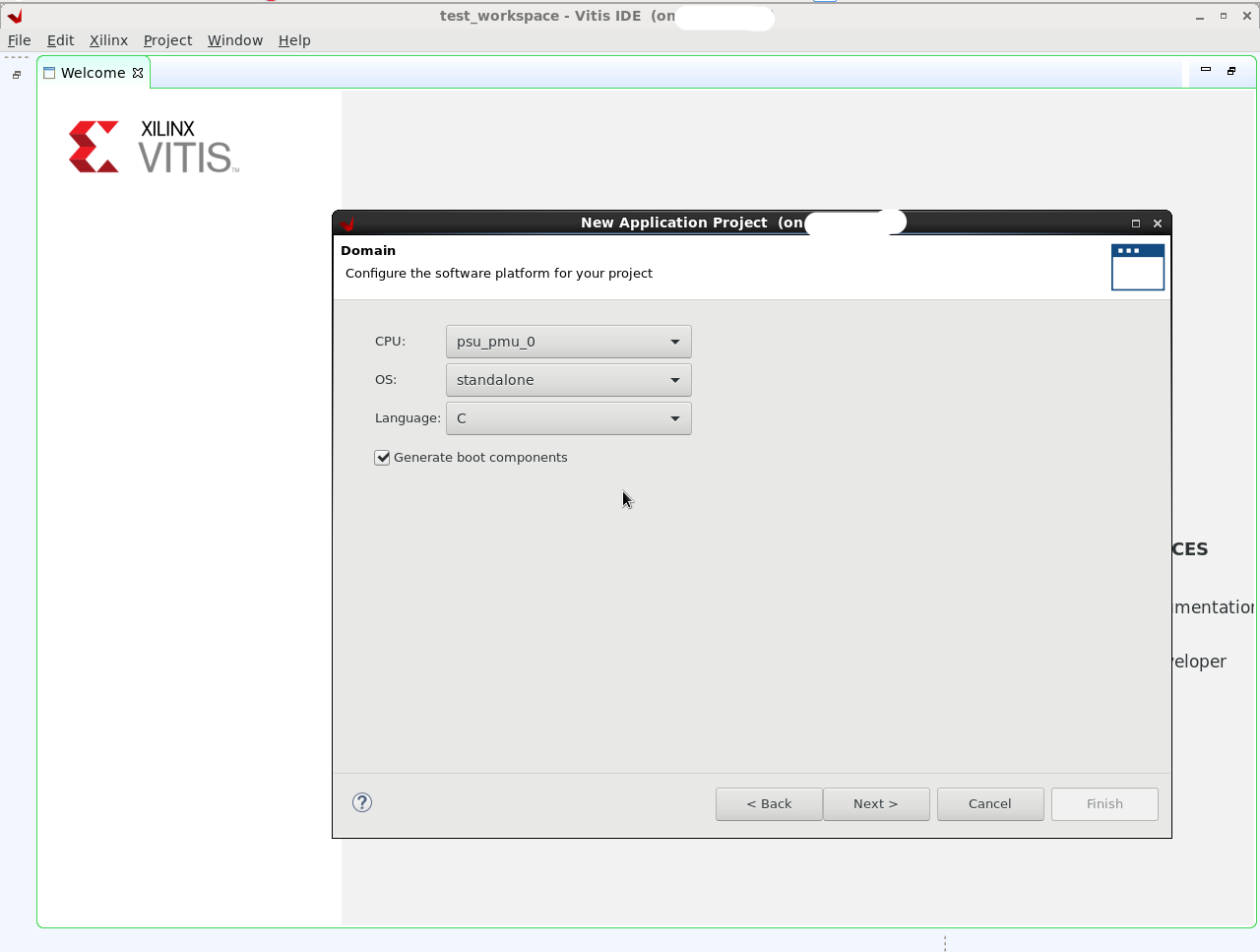
- Now select the domain option as below and click on next
- CPU: psu_pmu_0
- OS: standalone
- Language: C
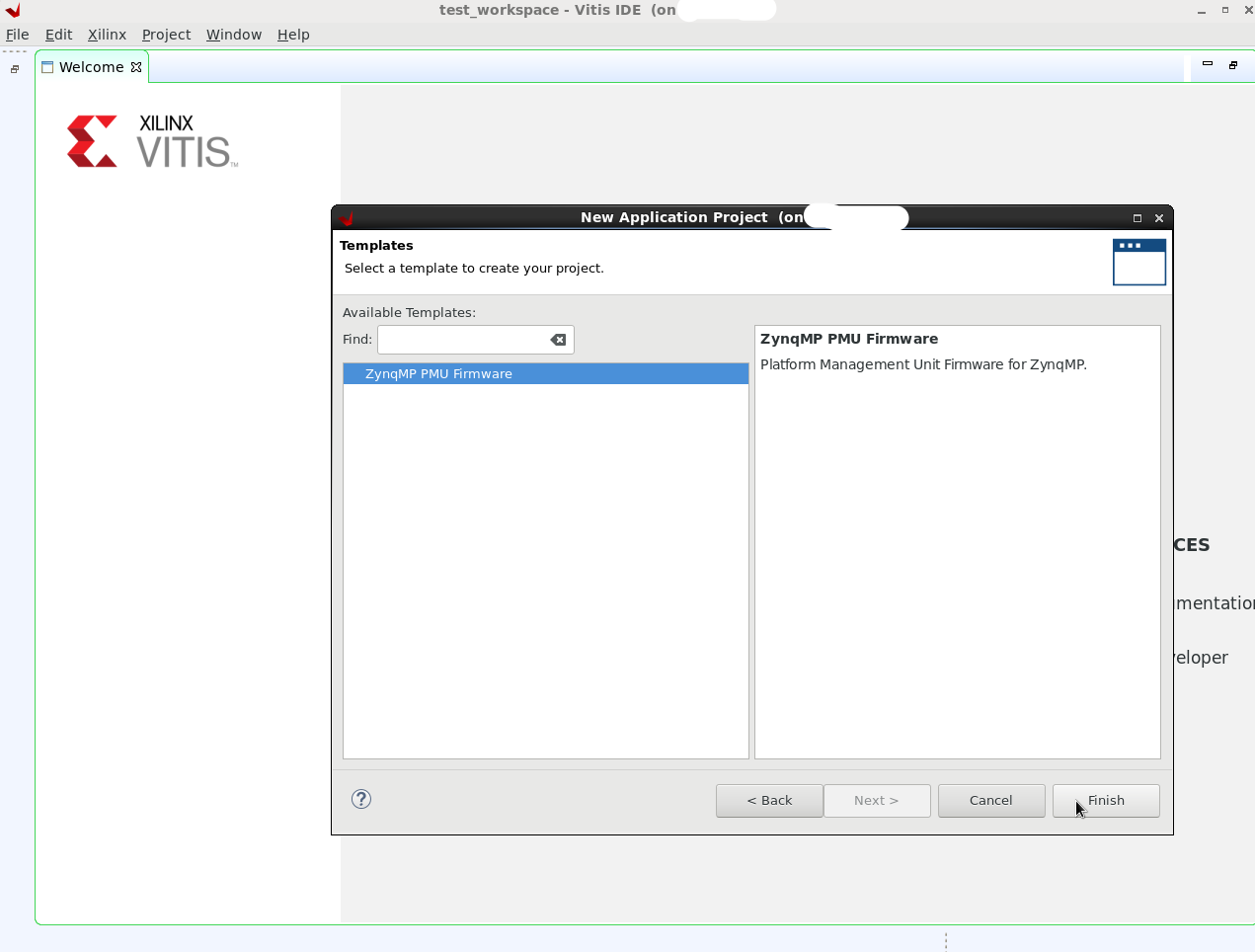
- Select "ZynqMP PMU Firmware" template from Templates list and click on Finish.
- After this, PMU project will be created. Right click on the project and select "Build Project" to build PMU Firmware.
- Enter project name and click on Next. Eg: pmufw
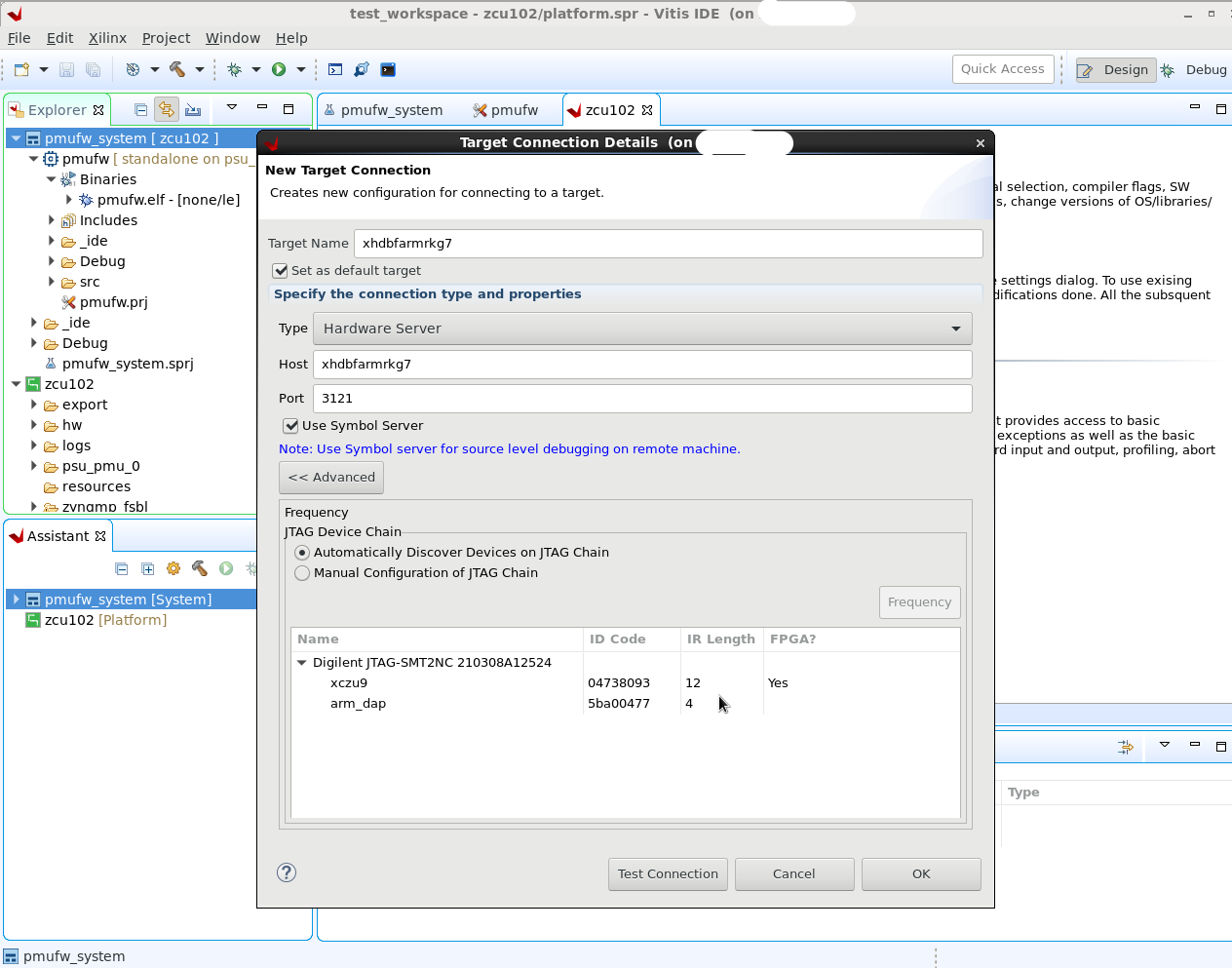
- Connect to the local board and test the connection. You should see a pop up showing that the connection was established successfully.
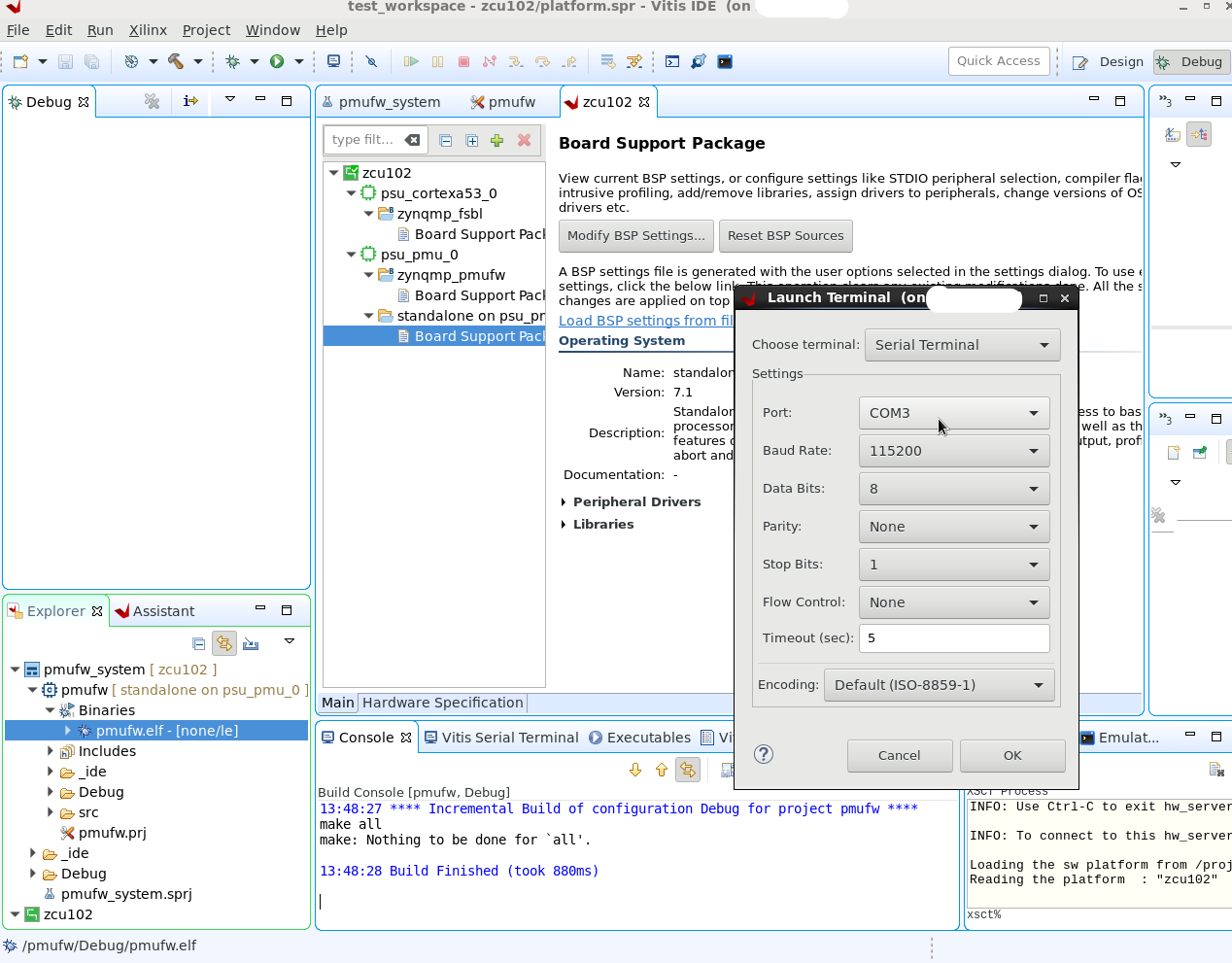
Connect to the COM port on the terminal to view the UART prints.
Info title IMPORTANT PMUFW uses psu_uart_0 as default STDOUT. This can be changed to other UARTs using the "Modify BSP Settings" dialogue. To enable debug prints from PMUFW, add DEBUG_MODE and/or XPFW_DEBUG_DETAILED to the defined symbols list in build settings dialog.
Additionally, Xilinx tools default to loading PMUFW from CBR in which case any early/init prints will not be seen. See Using FSBL to load PMUFW for more details.
Attention: When PMUFW logging is enabled, power management for the logging UART port will be disabled. Because of that, some system-wide power management operations will also be affected (e.g. suspend/resume operations may not work properly.) Therefore, PMUFW logging should be enabled only when necessary.
- On XSCT Console, Connect to the board and Run the PMU firmware.
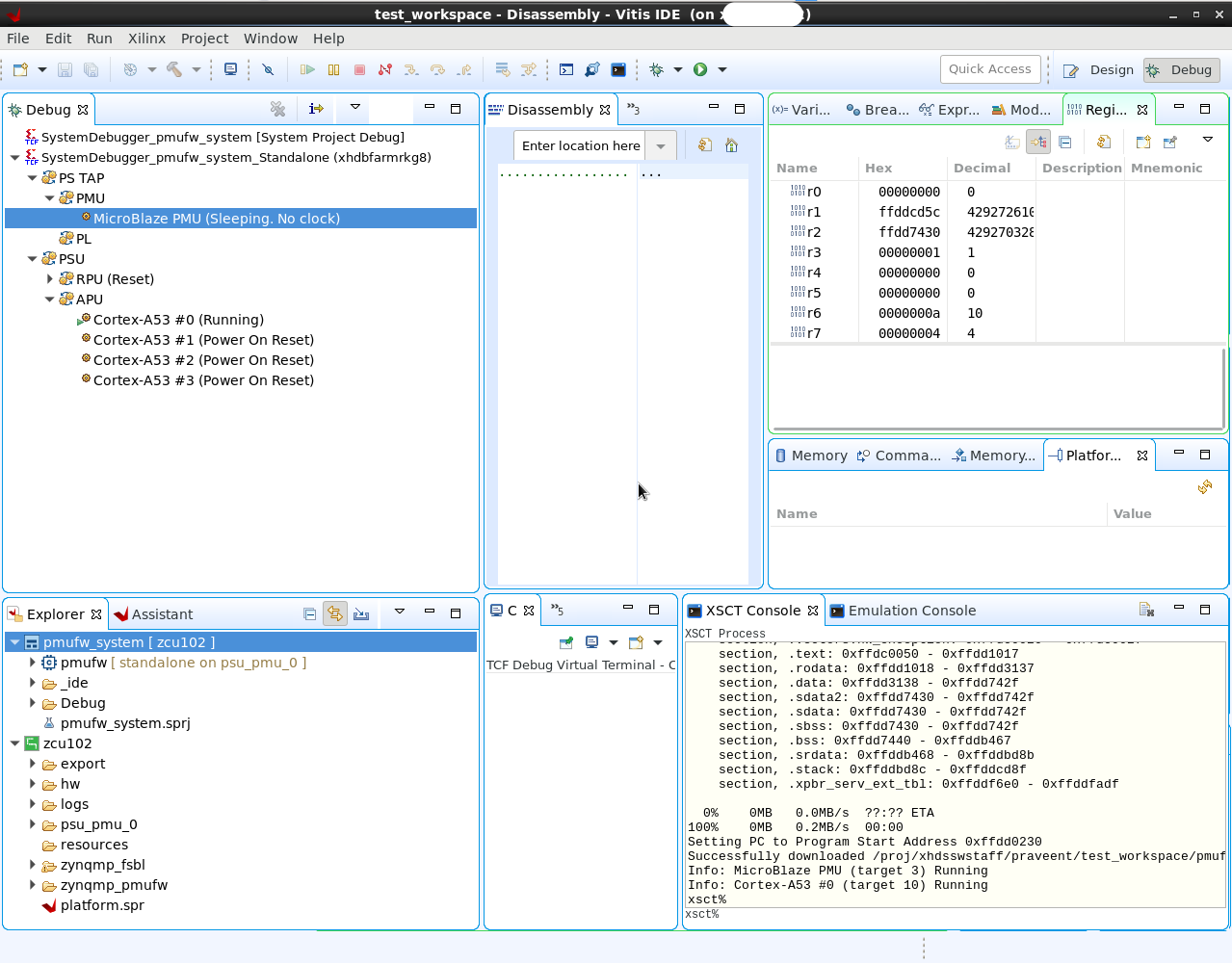
- View the PMU firmware prints on the Terminal console
Debugging PMU FW using Vitis
| Info |
|---|
PMU FW will be built with -Os and LTO optimizations by default. |
If the user need to disable the optimization (for debugging), two things need to be done:
Since removing optimization results in increase of code size and can result in not being able to build PMU FW, some of the features that the user don’t use, need to be disabled by removing build flags from project settings. And to further disable some features, it can be disabled in xpfw_config.h file of PMU FW
To disable/modify Optimizations, below changes need to be done:
PMU FW application: In "Miscellaneous" section, need to remove/modify highlighted options below:

...
| Info |
|---|
Note: When PMUFW is loaded in a non-JTAG Boot mode on a 1.0 Silicon, an error message "Error: Unhandled IPI received" may be logged by PMUFW at startup, which can be safely ignored. This is due to the IPI0 ISR not being cleared by PMU ROM which is fixed in 2.0 and later versions of Silicon. |
PMU Firmware can be loaded by either FSBL or by CSU BootROM (CBR). Both these flows are supported by Xilinx. PMU Firmware loading by CBR will be needed in the cases where the customer board has an onboard regulator that needs to be programmed to bring up the boot processor's power rail. Loading PMU Firmware using FSBL has these benefits: (i) Possible quick boot time, when PMUFW is loaded after bit-stream, (ii) In use cases where the user want two BIN files - stable and up-gradable, PMUFW can be part of the up-gradable (by FSBL) image.
Using FSBL to load PMU FW
| Info |
|---|
Note: This method of loadind PMUFW (versus loading by CBR) is necessary to see any early prints issued by PMUFW during initialization. |
- We already have pmufw.elf with us. ( See building PMU FW at the top of this page)
- Build an FSBL in the Vitis for A53. ( R5 can also be used)
- Create a hello_world example for A53. Right Click on the "hello_world example" project and select "Create a boot image"
- Create a new bif file. Choose
- Architecture : ZynqMP
- You will see A53 fsbl and hello_world example by default in partitions. We need pmufw too.
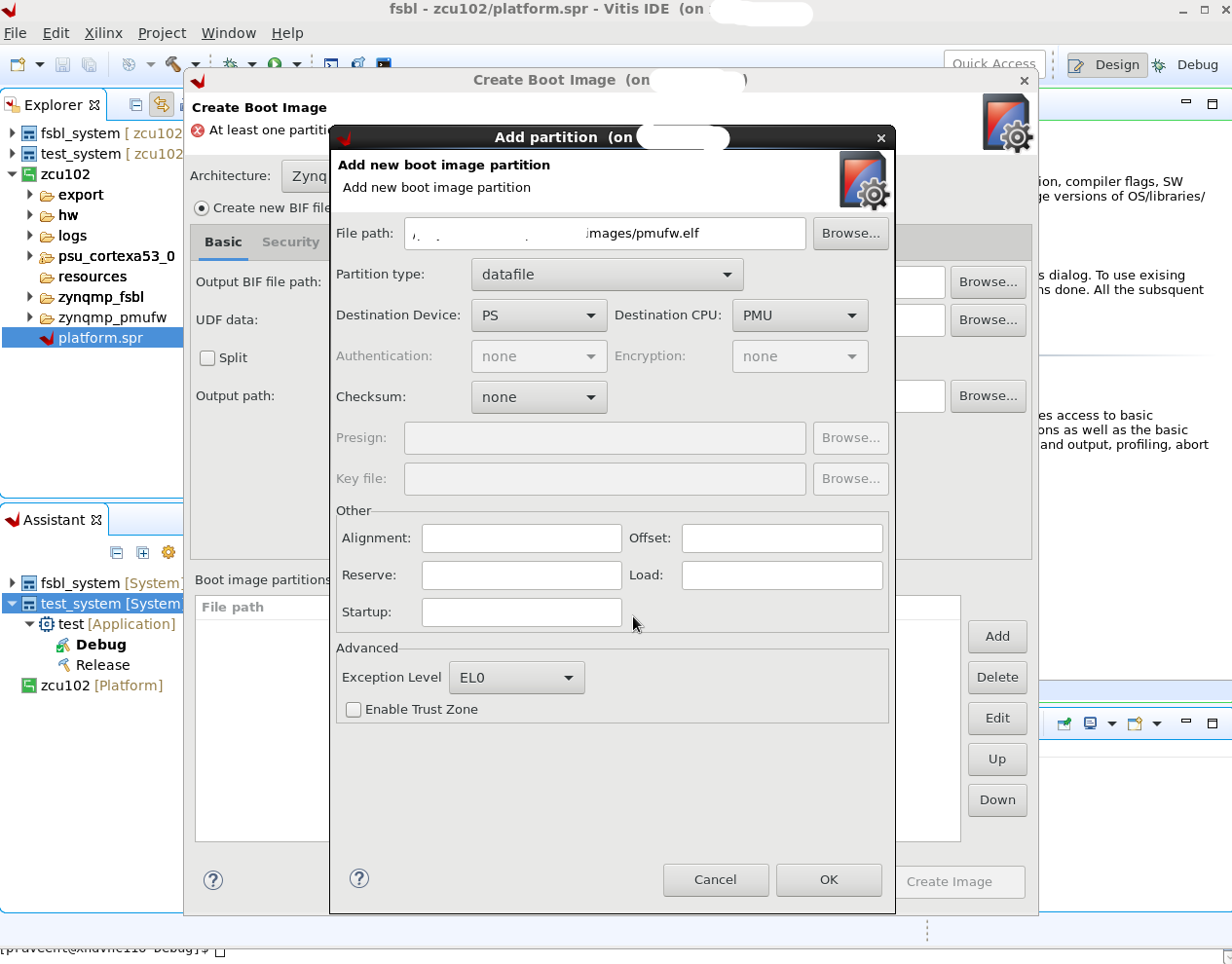
- Click on Add, then provide pmufw.elf path. Also Partition type: datafile, Destination device : PS, Destination CPU : PMU
- Click OK.
- After adding pmufw as partition. Click on pmufw partition and click UP bottom.
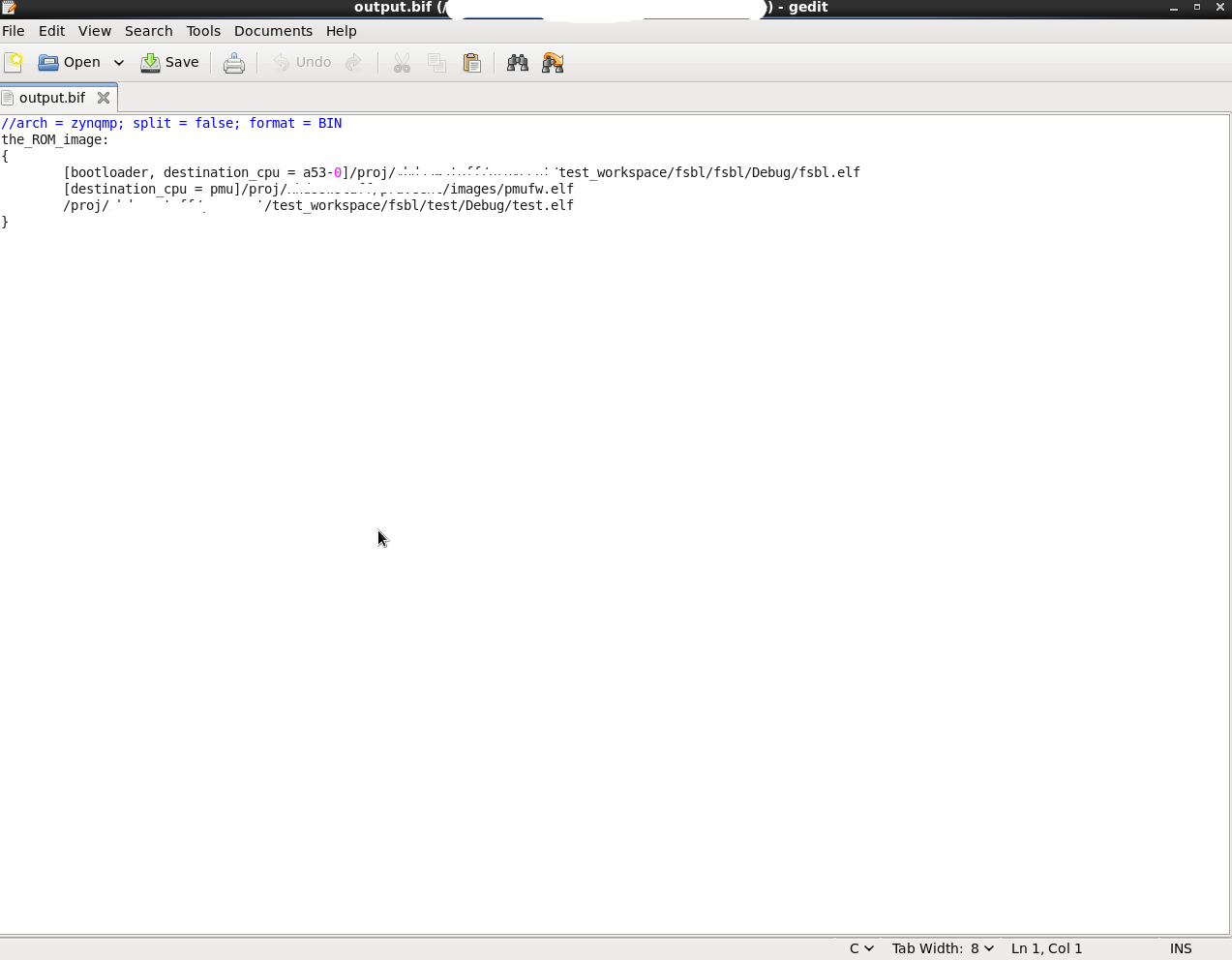
- Make sure partition order
- A53 fsbl
- pmufw
- hello world App
- Click on Create Image. You will see BOOT.bin created in a new folder "bootimage" in your example project.
- View the .BIF file to confirm the partition order.
- Now copy this BOOT.bin into SD card.
- Boot the ZCU102 board in SD boot mode. You can see the fsbl -> pmufw ->hello_world example prints in a sequence.
Using CBR to load PMU FW
| Info |
|---|
Note: When PMUFW is loaded by CBR, it is executed prior to FSBL. So the MIOs, Clocks and other initializations are not done at this point and this means that the PMUFW banner and other prints may not be seen prior to FSBL. |
- To make CBR load pmufw, we just need to change the BOOT.bin boot partitions.
- Now steps listed above (1 -> 3) are same.
- Create a new bif file. Choose
- Architecture : ZynqMP
- You will see A53 fsbl and hello_world example by default in partitions. We need pmufw too.
- Click on Add, then provide pmufw.elf path. Also Partition type: pmu (loaded by bootrom).
- Click OK.

- Click on Create Image. You will see BOOT.bin created in a new folder "bootimage" in your example project.
- You can also view .BIF to confirm the partition order.

- Now copy this BOOT.bin into SD card.
- Boot the ZCU102 board in SD boot mode. You can see the pmufw -> fsbl ->hello_world example prints in a sequence.
PMU FW Build Flags
| Flag | Description | Requires these flags/build options to be enabled | Default setting |
| XPFW_DEBUG_DETAILED | Enables detailed debug prints in PMU Firmware Additionally, see Using FSBL to load PMUFW regarding necessary configuration to see early prints during initialization. | Disabled | |
| PM_LOG_LEVEL | This enables print based debug functions for PM module. Possible values are:
Higher numbers include the debug scope of lower number, i.e: enabling 3 (warnings) also enables 1 (alerts) and 2 (errors) Additionally, see Using FSBL to load PMUFW regarding necessary configuration to see early prints during initialization. | Disabled | |
| ENABLE_EM | Enables Error Management Module | ENABLE_SCHEDULER | Disabled |
| ENABLE_ESCALATION | Enables escalation of sub-system restart to SRST/PS-Only if the first restart attempt fails | ENABLE_RECOVERY | Disabled |
| ENABLE_RECOVERY | Enables WDT based restart of APU sub-system | ENABLE_EM, ENABLE_SCHEDULER, ENABLE_PM | Disabled |
| ENABLE_NODE_IDLING | Enables idling and reset of nodes before force shutdown of a sub-system | Disabled | |
| ENABLE_PM | Enables Power Management Module | Enabled | |
| ENABLE_SCHEDULER | Enables Scheduler Module | Enabled | |
| ENABLE_WDT | Enables WDT based restart functionality for PMU using CSU WDT | ENABLE_SCHEDULER, ENABLE_EM | Disabled |
| ENABLE_CUSTOM_MOD | Enables custom module which is a placeholder for user | Disabled | |
| ENABLE_STL | Enables STL Module | Disabled | |
| ENABLE_RTC_TEST | Enables RTC Event Handler Test Module | Disabled | |
| ENABLE_SAFETY | Enables CRC calculation for IPI messages | Disabled | |
| ENABLE_FPGA_LOAD | Enables FPGA bitstream loading | ENABLE_PM | Enabled |
| ENABLE_SECURE | Enables security features | ENABLE_PM | Enabled |
| XPU_INTR_DEBUG_PRINT_ENABLE | Enables debug prints for XMPU/XPPU error handling see Using FSBL to load PMUFW regarding necessary configuration to see early prints during initialization. | ENABLE_EM | Disabled |
| DEBUG_MODE | Enable debug logging and prints See Using FSBL to load PMUFW regarding necessary configuration to see early prints during initialization. | Disabled | |
| DEBUG_CLK | Enables dumping clock and PLL state functions | ENABLE_PM | Disabled |
| DEBUG_PM | Enables debug functions for PM | ENABLE_PM | Disabled |
| IDLE_PERIPHERALS | Enables idling peripherals before PS or System reset | ENABLE_PM | Disabled |
| ENABLE_POS | Enables Power Off Suspend feature | ENABLE_PM | Disabled |
| EFUSE_ACCESS | Enables eFuse access feature | ENABLE_PM | Disabled |
| ENABLE_MOD_ULTRA96 | Enable power button functionality for ULTRA96 board | ENABLE_PM, ENABLE_SCHEDULER | Disabled |
| ENABLE_SMMU | Bypass SMMU functionality in the firmware during suspend and rewoke the same when resume. | Disabled | |
| PMU_MIO_INPUT_PIN | Enables board shutdown related code | Disabled | |
| EXT_RESET_MIO_PIN_VAL | Board external reset MIO pin (32-37). For K26 and K24 by default it is configured as 35. | Disabled | |
| EXT_RESET_MIO_PIN_STATE_VAL | Board external reset MIO pin active state (0-1). | Disabled |
Power Management in PMU FW
Zynq MPSoC Power Management framework is based on an implementation of the Embedded Energy Management Interface (EEMI). This framework allows software components running across different processing units (PUs) on a chip or device to issue or respond to requests for power management....
Adding a Custom Module
Creating a New Module
Each set of user defined routines performing a specific functionality should be designed to be a module in PMUFW. These files should be self contained and can use APIs from xpfw_core.h to call in FW routines. Each module should support the following interfaces:1. Config Handler : Called during Init.
2. Event Handler: When a registered event is triggered
3. IPI Handler: When an IPI Message arrives with the registered IPI ID
To create a module, in the user_startup routine:
| Code Block | ||
|---|---|---|
| ||
PmModPtr = XPfw_CoreCreateMod(); (void)XPfw_CoreSetCfgHandler(PmModPtr, PmCfgInit); (void)XPfw_CoreSetEventHandler(PmModPtr, PmEventHandler); (void)XPfw_CoreSetIpiHandler(PmModPtr, PmIpiHandler,0U) |
Adding a Task to Scheduler
Tasks are functions which take void args and return void. Currently PMU Firmware has no way to check that the task returns in a pre-determined time, so this needs to be ensured by the task design. Let us consider a task which prints out a message:| Code Block | ||
|---|---|---|
| ||
void TaskPrintMsg(void)
{
xil_printf("Task has been triggered\r\n");
}
|
| Code Block | ||
|---|---|---|
| ||
Status = XPfw_CoreScheduleTask(TaskModPtr, 500U, TaskPrintMsg);
if(XST_SUCCESS == Status) {
xil_printf("Task has been added successfully !\r\n");
}
else {
xil_printf(Ërror: Failed to add Task.!\r\n");
}
|
Registering for an Event
All interrupts that come into PMU are exposed to user as Events with specific EVENTIDs defined in xpfwevents.h; Any module can register for an event (usually in CfgInitHandler) and the module's EventHandler will be called when an event is triggered. To register for an RTC Event:| Code Block | ||
|---|---|---|
| ||
Status = XPfw_CoreRegisterEvent(ModPtr,XPFW_EV_RTC_SECONDS); |
Example of an EventHandler
| Code Block | ||
|---|---|---|
| ||
void RtcEventHandler(const XPfw_Module_t *ModPtr, u32 EventId)
{
xil_printf("MOD%d:EVENTID: %d\r\n", ModPtr->ModId, EventId);
if(XPFW_EV_RTC_SECONDS == EventId){
/* Ack the Int in RTC Module */
Xil_Out32(RTC_RTC_INT_STATUS,1U);
xil_printf("RTC: %d \r\n", Xil_In32(RTC_CURRENT_TIME));
}
} |
PMU Firmware Memory Footprint
This section contains the approximate details of PMU Firmware Memory Footprint with various modules enabled.In PMU Firmware,
- PM and FPGA modules are enabled by default. FPGA block in PMU Firmware does the xilfpga and xilsecure functionality which performs loading of bitstream to PL, loading of secure image to memory and reading FPGA status. FPGA block does not have a separate build flag for itself and is part of PM module.
- Error Management and Restart modules are not enabled by default
Note: All of the metrics are with compilation optimized for size -Os. This optimization setting is enabled by default in Vitis. To disable the same, user need to follow the steps mentioned in Debugging PMU FW using Vitis section above
| S.No | Feature/Component | Size occupied (KB) | Free space (KB) | Additional Notes | Remarks |
| 1 | PMU Firmware without detailed debug prints enabled | 112.5 | 15.5 | This is with base PMU Firmware, PM module and FPGA block | |
| 2 | PMU Firmware with detailed debug prints enabled | 123 | 5 | Detailed debug prints are enabled when XPFW_DEBUG_DETAILED and DEBUG_MODE flags are defined | This estimation is with combination of (1) and (2) |
| 3 | PMU Firmware with Error Management Module enabled | 115.4 | 12.6 | Error Management module is enabled when ENABLE_EM and ENABLE_SCHEDULER flags are defined | This estimation is with combination of (1) and (3) |
| 4 | PMU Firmware with Restart Module enabled | 117.5 | 10.5 | Restart module is enabled when ENABLE_RECOVERY, ENABLE_ESCALATION and CHECK_HEALTHY_BOOT flags are defined along with ENABLE_EM and ENABLE_SCHEDULER flags | This estimation is with combination of (1) and (4) |
Examples to enable/disable modules
- PM module is enabled by default with ENABLE_PM build flag. This build flag is defined in <PMU Firmware Application>/src/xpfw_config.h file. To disable PM Module, user need to make changes to xpfw_config.h file by removing/commenting defined ENABLE_PM flag.
- All other build flags can be enabled by following the below steps.
- Right click on the PMU Firmware project and select "C/C++ Build Settings" option. Properties window appears
- Select "Settings" from "C/C++ Build" options. In "Tool Settings" tab, select "Symbols" from "Microblaze gcc compiler" option
- Click on "Add" under "Defined symbols (-D)"
- Enter flag name to define and click "Ok"
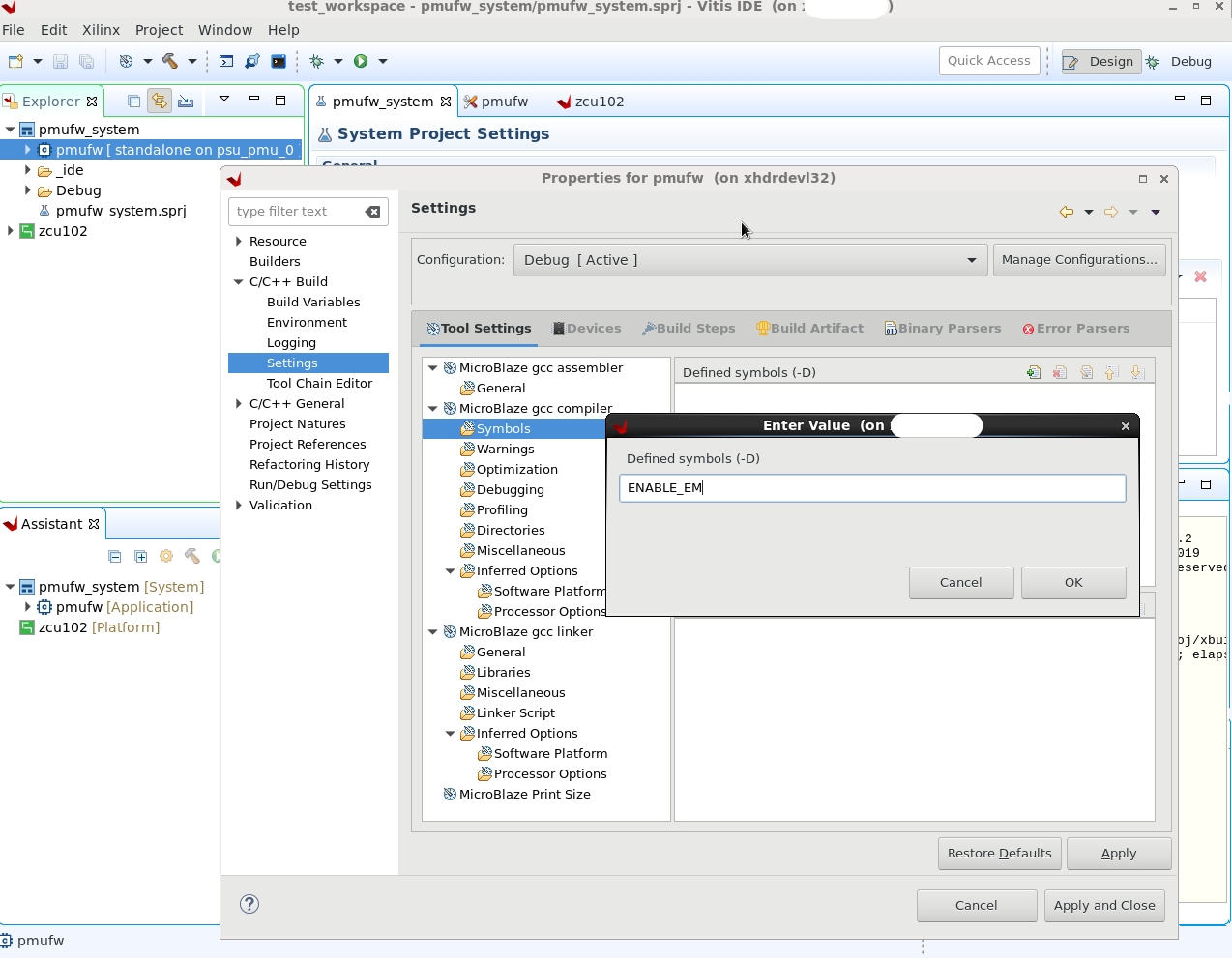
- Again click "Ok" on properties window and the application will start building with the new compile flags defined
Registers reserved for PMU Firmware
Following are the general storage registers used by PMU Firmware- 0xFFD80034 (PMU_GLOBAL_GLOBAL_GEN_STORAGE2) → Since 2018.1 if POS is enabled, FSBL waits till PMU has finished resuming by polling this register. Users are free to use this register after reset so it can still be considered as "reserved for customers".
- 0xFFD80038 (PMU_GLOBAL_GLOBAL_GEN_STORAGE3) → Since 2018.1 if POS is enabled, PMU waits till FSBL has finished reading the boot type. This additional handshake step is required in boot scenarios where FSBL is started by CSU. PFW must wait for CSU to trigger FSBL start otherwise there may be race condition where PFW is trying to restore state of processor as part of resume from Power Off Suspend sequence while CSU is trying to run FSBL on that same processor. Users are free to use this register after reset so it can still be considered as "reserved for customers".
- 0xFFD80040 (PMU_GLOBAL_GLOBAL_GEN_STORAGE4 - bit 0) → This register bit needs to be written by upper layer APU applications. So that, in case of FPD WDT error (and when ENABLE_RECOVERY and CHECK_HEALTHY_BOOT macros are defined), PMU checks this register to find out if previous boot was successful and does subsystem restart only if last boot was successful.
- 0xFFD80040 (PMU_GLOBAL_GLOBAL_GEN_STORAGE4 - bits 1 and 2) → Since 2018.3, these bits are used to know the status of RPU 0 and RPU 1 usage which will be updated by FSBL. Based on this information, PMU will decide whether to shutdown the unused RPU cores or not.
- 0xFFD80040 (PMU_GLOBAL_GLOBAL_GEN_STORAGE4 - bits 3 and 4) → Since 2018.3, these bits are used to set the restart scope to ATF in case of WDT restart.
- 0XFFD80040 (PMU_GLOBAL_GLOBAL_GEN_STORAGE4 - bit 16) → Written by PMU Firmware, FSBL uses this register bit to know if reset is APU only reset.
- 0XFFD80044 (PMU_GLOBAL_GLOBAL_GEN_STORAGE5 - bit 0) → Written by FSBL, PMU Firmware uses this register to know if FSBL has completed its execution. Since 2018.1, this check is performed to initialize and start the CSU WDT timer when ENABLE_WDT macro is defined.
- 0XFFD80044 (PMU_GLOBAL_GLOBAL_GEN_STORAGE5 - bits 1 and 2) → Written by FSBL. PMU Firmware uses these bits to know if FSBL is running on which processor. 01: APU, 10: RPU0, 11: RPU LS
- 0xFFD80044 (PMU_GLOBAL_GLOBAL_GEN_STORAGE5 - bits 16 to 23) → Since 2018.3, XilFPGA library in PMU uses these bits to store the PL state to know whether secure bit-stream or non-secure bit-stream or no bit-stream loaded. This information is used by XilFPGA Readback feature to dis-allow readback in case secure bit-stream is loaded.
- 0xFFD80050 (PMU_GLOBAL_PERS_GLOBAL_GEN_STORAGE0) → This register is used to store Exception Status Register (ESR) value of the PMU Microblaze register when any exception occurs.
- 0xFFD80054 (PMU_GLOBAL_PERS_GLOBAL_GEN_STORAGE1) → This register is used to store Exception Address Register (EAR) value of the PMU Microblaze register when any exception occurs.
- 0xFFD8006C (PMU_GLOBAL_PERS_GLOBAL_GEN_STORAGE7 - bit 3) → Since 2018.3, PMU is using this bit to indicate FSBL whether DDR is in self-refresh mode or not. PMU will set this bit if DDR is in self-refresh during warm-restart and clears after the restart.
And 0xFFD8004C (PMU_GLOBAL_GLOBAL_GEN_STORAGE7) is used by PMU_ROM. This register is used in case we encounter problems with the PL Power Up routine in which ROM does not wait long enough for the PL to come out of reset. The time ROM waits can be extended by increasing the value of this register.
...
What's new in 2022.1 release
- Updated to give/change permissions for writing another overlay config object
- Cleanup of dynamic feature config logic to enable them only if dynamic feature config is enabled
- Added IOCTL support for dynamic SD, GEM and USB configuration under ENABLE_DYNAMIC_MIO_CONFIG macro which is disabled by default
Give an error when same overlay configuration for existing node is called multiple times
Added provision in ZynqMP PMUFW to skip XFPGA_SECURE_MODE macro
- Return unique error code if slave is already configured
- Added support for feature check API
- Implemented new API's to get XilFPGA component information
- Re-apply PLL workaround when DP device is added
Provide user option to manually enable DDR XMPU settings using ENABLE_DDR_XMPU macro which is disabled by default
- Fix issue on SOM related to enabling build flags
- There is a known GCC warning observed while building PMUFW:
In function 'PmSecureAes': ../src/pm_core.c:1079:34: warning: 'InstancePtr' may be used uninitialized
...